系统组件
Robonix 将操作系统职责拆分为 12 个系统组件,每个组件在 system/<name>/ 下有独立目录与 README。
本页描述的是 dev 分支当前真实的实现状态——哪些已落地、哪些还是 stub——而不是白皮书的目标蓝图。
总体架构与运行流程
Robonix 以 能力(capability) 为统一抽象。每个能力由 契约(contract) 定义:ROS IDL 描述其输入输出,契约同时指定通信模型(请求响应、单向输出流)与承载(gRPC、ROS 2、MCP)。调用方不依赖具体组件,而是按 contract_id 经 Atlas 查询能力、解析 endpoint 后调用。能力由三类提供者实现:原语 primitive、服务 service、技能 skill。
任务流转
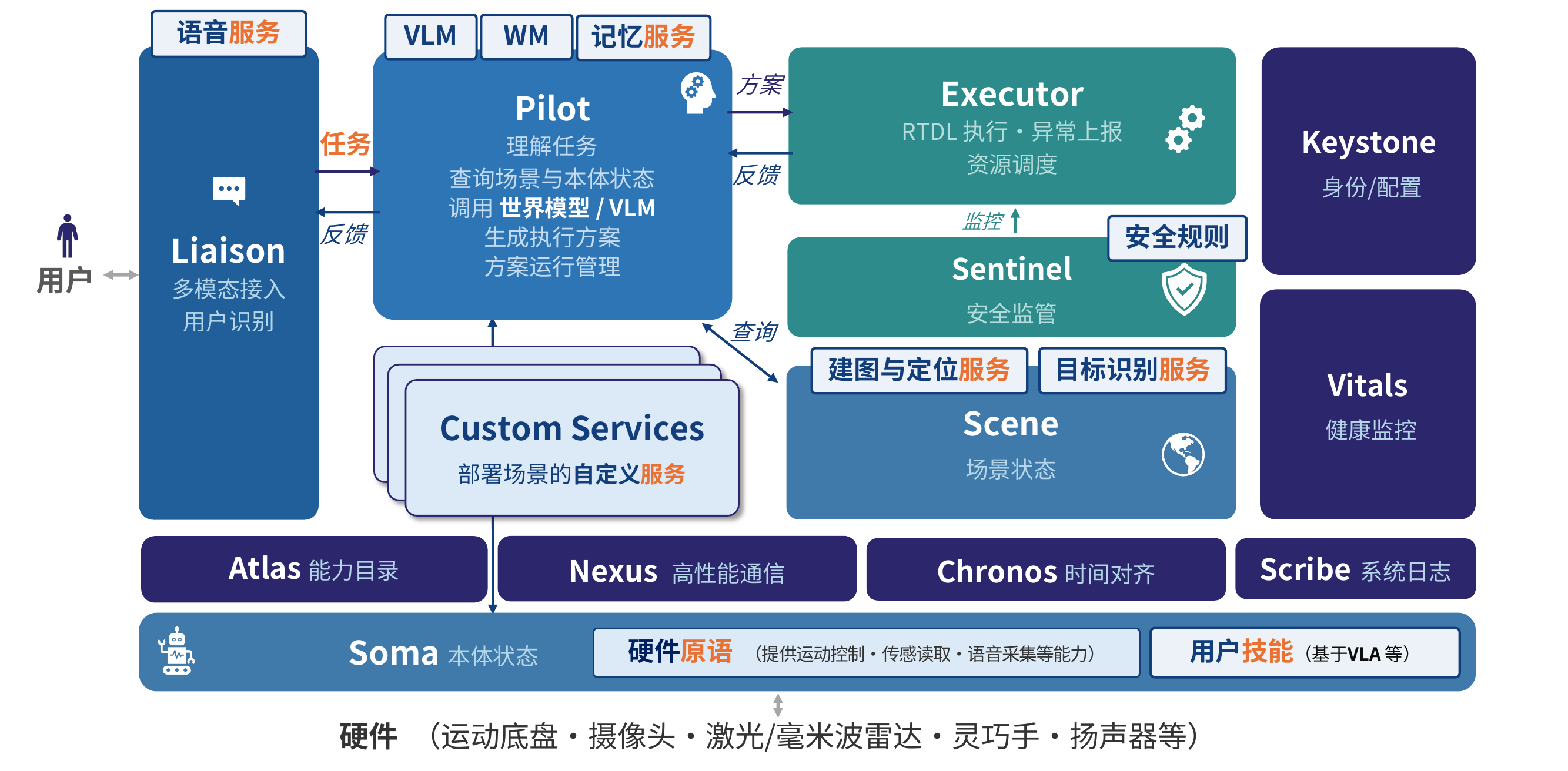
一次任务是 Pilot 驱动的多轮闭环。
- Liaison 接收文本或语音输入。语音链路经声纹完成识别与准入,将输入封装为 Task 提交给 Pilot,并以事件流向用户回传过程与结果。
- Pilot 每轮以 Scene 的场景状态、Soma 的本体描述与对话历史为上下文调用 VLM,生成一棵 RTDL 动作树,展平为 Plan 提交给 Executor。
- Executor 解释 RTDL 算子(
sequence、parallel、do),按contract_id经 Atlas 定位 provider 并调用能力。每次调用前由 Sentinel 依规则校验放行。同步能力直接返回终态,异步能力轮询status至终态;执行事件流式回传 Pilot。 - Pilot 依执行结果进入下一轮规划,直至 VLM 返回空方案,任务结束。
三个层次
- 基础设施:Atlas(能力注册与发现)、Nexus(gRPC、MCP、ROS 2 通信)、Chronos(统一时钟与源头时间戳)、Scribe(结构化日志)。所有系统组件共用。
- 支撑服务:Keystone(用户身份、偏好、准入)、Vitals(电源与部件健康)。由 Pilot、Sentinel、Liaison 按需查询。
- 本体层:Soma 提供与厂商无关的本体描述;
primitive将厂商 SDK 封装为统一能力(底盘、机械臂、相机、雷达、音频);skill封装模型类能力,如 VLA 动作策略。
12 个组件
| 组件 | 负责 | 状态 | 实现 |
|---|---|---|---|
| atlas | 能力发现 / 目录 | 已实现 | Rust(system/atlas) |
| chronos | 统一时间 / PTP 对齐 | stub | system/chronos(仅 README) |
| executor | 方案编排与能力分发 | 已实现 | Rust(system/executor) |
| keystone | 身份 / 配置 / 策略 | stub | system/keystone |
| liaison | 人机交互(chat / 语音 / TUI) | 已实现 | Rust(system/liaison) |
| nexus | gRPC / MCP / ROS 2 通信库的集合 | 库,非独立进程 | 现有 gRPC/MCP/ROS 2;未来加自研 ROS 2 零拷贝 |
| pilot | 规划 / 决策 / 记忆 / 世界模型 | 已实现 | Rust(system/pilot) |
| scene | 场景状态 / 语义地图 / 对象注册表 | 已实现 | Python(system/scene) |
| scribe | 结构化日志 / 回放 / 审计 | stub | system/scribe |
| sentinel | 安全监督 | 内嵌 executor(v0.1) | system/sentinel |
| soma | 本体状态 / 设备与原语抽象 | stub(能力约定已定) | system/soma |
| vitals | 健康监测 / 心跳 | 部分(经 atlas 心跳) | system/vitals |
实现 vs stub
v0.1 真正以独立进程跑起来的有 5 个:atlas / executor / pilot / liaison(Rust 二进制,make install 装到 ~/.cargo/bin)和 scene(Python 服务)。另外几个不是独立进程:
- nexus:不是进程,而是一套通信库的集合——gRPC、MCP、ROS 2 的客户端/服务端实现,每个组件直接链接使用(能力约定就投影到这三种 transport 上)。规划中还包括自研的 ROS 2 零拷贝库。它不是“待实现的 stub“,而是已经在用的那套传输代码。
- sentinel:安全监督作为 executor 的子模块跑(在能力分发链路上拦截),还没拆成独立组件。
- vitals:健康监测的心跳那一半在 atlas 里(provider 周期心跳、超时驱逐),独立的 vitals 组件未起。
其余 4 个——chronos / keystone / scribe / soma——是 v0.1 的 stub:目录和 README 占位,规划在后续版本落地(soma 的能力约定已经定义,见 Soma 接口,缺的是参考 provider)。
与能力约定层的关系
system 组件里对外暴露能力约定的有 pilot / executor / liaison / scene / soma(命名空间 robonix/system/*,见 系统接口)。atlas 用自己的 gRPC 控制面(不是能力约定,见 Atlas 能力目录)。其余 stub 暂无能力约定。
启动顺序见 系统部署与启动流程。