robonix 具身智能操作系统开发与使用文档
犀照世界 灵通万物 为机器筑心 为具身立智
欢迎使用 robonix!
robonix 是一个面向具身智能的操作系统,采用感-联-知-控架构,通过 Capability 和 Skill 抽象为具身应用提供统一的编程接口。
本文档主要分为以下几个部分:
- 第一章:快速开始 - 项目介绍、安装配置、运行 Demo
- 第二章:用户手册 - API 文档、编程接口、使用指南(面向应用开发者)
- 第三章:开发文档 - 系统架构、模块设计、开发指南(面向系统开发者)
- 第四章:附录 - 相关文献、术语表、FAQ
安装与配置
系统要求
安装步骤
快速入门
第一个 robonix 程序
Hello World 示例
运行示例程序
第二章:用户手册
本章面向应用开发者,介绍如何使用 robonix 提供的接口编写具身智能应用。
本章内容
本章重点介绍 robonix 为应用开发者提供的编程接口和工具:
核心编程模型
- Virtual Entity Graph (VEG):虚拟实体图模型,统一抽象机器人、传感器、物体等实体及其关系
- Capability API:系统提供的原子能力接口(硬件抽象层)
- Skill API:组合多个 Capability 的复合技能接口
- Action 编程:声明式的任务编排和执行模型
数据与协议
- 数据格式规范:传感器数据、控制指令等标准格式
- 坐标系约定:统一的空间坐标系定义
- 时间戳规范:时间同步和时间戳管理
学习路径
- 新手入门:从 Virtual Entity Graph 开始,理解 robonix 的实体抽象模型
- 掌握能力系统:学习 Capability API 和 Skill API
- 编写应用:通过 Action 编程 编排任务
- 深入实践:查看 编程示例 和 编程指南
设计理念
robonix 的用户接口设计遵循以下原则:
- 软硬解耦:智能算法与硬件实现分离,应用代码与具体硬件无关
- 分层抽象:Capability-Skill-Action 三层抽象,逐步提升编程层次
- 声明式编程:描述"做什么"而非"怎么做",降低编程复杂度
- 类型安全:完整的类型系统保证接口正确性
注意:本章只讲接口如何使用,不涉及系统内部实现细节。如需了解架构设计和实现原理,请参阅第三章:开发文档
Capability API
Skill API
Virtual Entity Graph (VEG)
概述
Virtual Entity Graph (VEG) 是 robonix 的核心编程模型,提供了一种统一的方式来表示和管理具身智能系统中的各种实体及其关系。
VEG 将物理世界中的机器人、传感器、物体等抽象为虚拟实体(Entity),并通过 虚拟实体图(Virtual Entity Graph) 结构来表达它们之间的关系和交互。
核心概念
Entity(实体)
实体是 VEG 中的基本单元,代表物理世界或虚拟空间中的一个对象。每个实体具有:
- 唯一标识符 (ID):全局唯一的实体标识
- 类型 (Type):如 Robot、Sensor、Object、Space 等
- 属性 (Properties):描述实体的状态和特征
- 能力绑定 (Skill Binding):实体可以执行的技能
Action 编程模型
概述
Action 是 robonix 中用于描述具身智能任务的编程和动作编排单元。
第三章:开发文档
本章面向系统开发者,详细介绍 robonix 的内部架构、设计原则和开发指南。
robonix 系统架构设计
- EHAL 层(Embodied Hardware Abstraction Layer)
- 感知模块(Sensing Module)
- 控制模块(Control Module)
- 认知模块(Cognition Module)
- 管理模块(Management Module)
- 互联模块(Networking Module)
- 内核与中间件层(Kernel and Middleware Layer)
- 参考文献
具身智能是指具身身体执行动作与环境交互,感知外部环境,并通过大脑进行持续学习、决策规划的能力。随着2023 年以来大语言模型与机器人的深度融合,基于视觉语言动作(Vision Language Model,VLA)模型的具身智能快速发展,然而目前的 VLA 存在一系列问题:
- 模型训练和具体的具身硬件绑定,更换底层硬件就会使得模型失效,需要重新训练;
- 软件控制算法、驱动代码与硬件绑定,代码不具有可迁移性,难以复用。专家式地“面向ROS包编程”;
- VLA 对执行复杂任务的支持不足,缺乏复杂任务规划能力;
- 硬件能力与资源无法共享,具身应用存在相互影响的现象(例如大语言模型的推理会导致 SLAM 运行缓慢导致任务失败)。
为了解决目前具身智能系统中所出现的相关问题,Syswonder 社区开发了面向多场景的模块化具身智能操作系统—— robonix,代码主页位于 https://github.com/syswonder/robonix。robonix 的核心设计理念包括以下几点:
- 硬件解耦:通过具身硬件抽象,将具体的硬件抽象为能力(Capability)和技能(Skill)的提供者。robonix 通过硬件解耦实现系统在不同硬件的可迁移性;
- 软件抽象:对上层应用用户和开发者提供系统接口(API),开发者通过编写动作(Action)程序的方式使用系统提供的各种硬件与软件资源。robonix 通过软件抽象的方式提供具身软件开发生态;
- 资源管理:通过对系统内注册过的硬件能力进行管理和调度,提供高并发具身应用的稳定运行支持,提高资源利用率;
- 感联知控:
- 感:提供标准的数据输入框架,包括传感器设备模型、数据采集与整理等模块;
- 联:提供系统级数据总线支持,通过整合 Linux 与 ROS2 实现多机时间戳同步等功能;
- 知:认知部分通过提供语义地图框架、大语言模型 Agent 支持、大语言模型加载支持、基于模拟器和世界模型(World Model) [2]的动作评估,来实现系统级任务规划;
- 控:提供标准的控制框架,包括控制器设备模型,控制接口等模块。
robonix 的系统架构如下图所示:
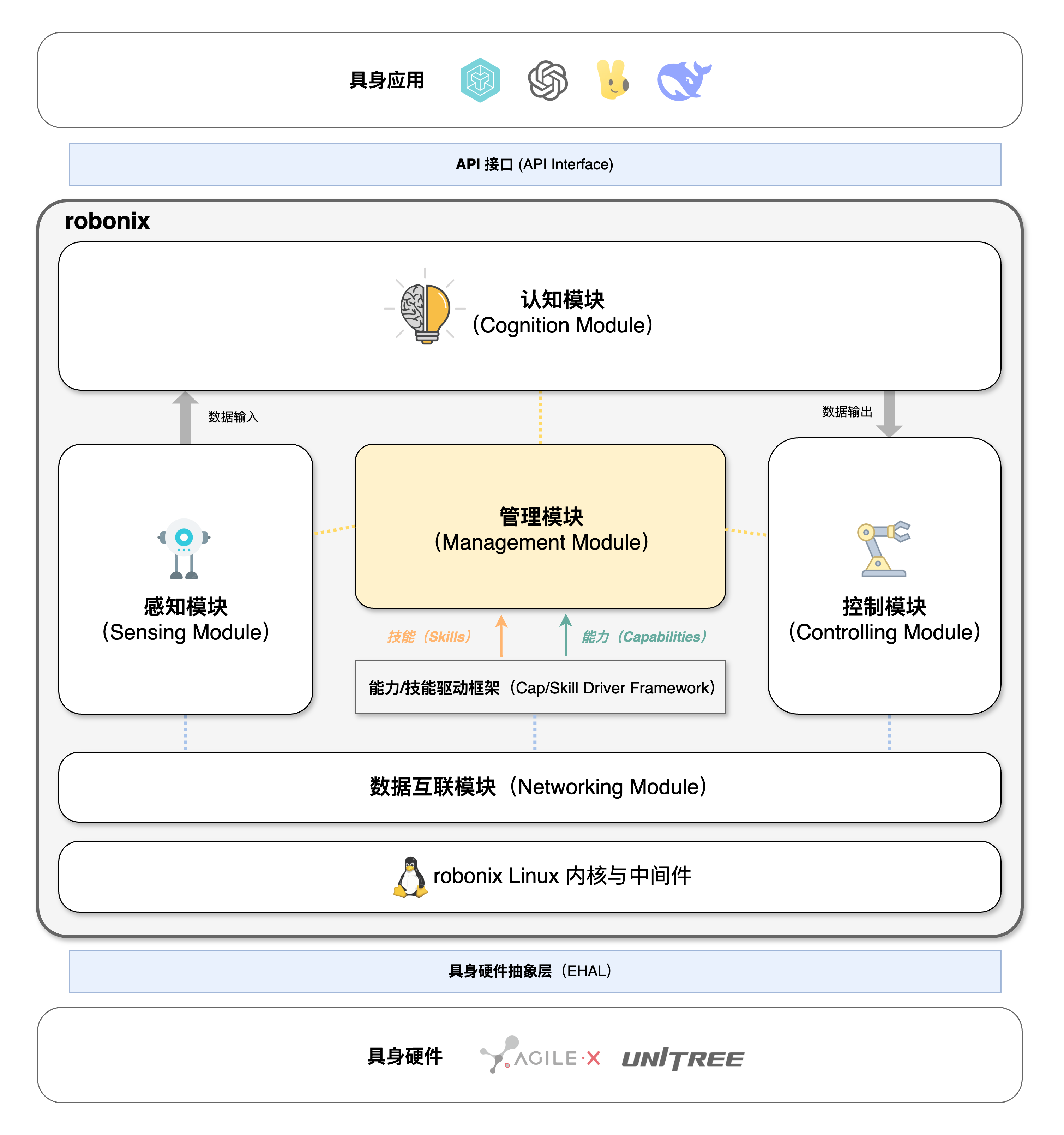
EHAL 层(Embodied Hardware Abstraction Layer)
EHAL 层是 robonix 的核心抽象之一,其由能力(Capability)和技能(Skill)组成。
定义
✤ 能力(Capability):是指针对某一个机器人硬件,其所提供的与硬件相关的能力;
✤ 技能(Skill)是指通过组合调用若干能力与其他技能所实现的软件算法和逻辑,与硬件无关。
类比 Linux 或 Android 的厂家驱动,能力与技能由对应的厂家开发实现,在开发时对接图中的 能力/技能驱动框架(Capability/Skill Driver Framework),在运行时由 robonix 管理模块进行调度。该驱动框架是上层感知模块和控制模块与底层 EHAL 的接口。
感知模块(Sensing Module)
正如 Android 未来统一各种不同感知硬件而设计的传感器框架 [1],同理,robonix 同样需要一个感知模块来实现:
- 对 EHAL 提供的能力与技能的整理;
- 感知数据的输入和预处理、预认知;
- 向上(感知模块)、向内(管理模块)提供数据与控制接口。
感知模块将会提供一系列规范的 传感器模型(Sensor Model):
- 运动传感器(Motion Sensor):提供机器人的运动状态数据,包括位置、速度、加速度、位姿,里程(Odometry)等;
- 环境传感器(Environment Sensor):提供机器人周围环境数据,包括光照、温度、湿度、气压、海拔等;
- 距离传感器(Distance Sensor):提供机器人与周围物体之间的距离数据,包括超声、激光、毫米波等;
- 视觉传感器(Vision Sensor):提供机器人的视觉数据,包括图像、视频等;
- 音频传感器(Audio Sensor):提供机器人的音频数据,包括对音频的监听和采样等;
- 力传感器(Force Sensor):提供机器人的力数据,包括触摸、压力等;
- 其他传感器(Other Sensor):TODO。
定义
✤ 传感器模型(Sensor Model):是指对传感器物理硬件的一种虚拟抽象,通过抽象模型实现传感器数据的统一处理和标准化输出。
感知模块的组成:
- 传感器管理器(Sensor Manager):负责管理传感器设备,包括传感器设备的注册、注销、数据采集、硬件参数配置等,例如我们在实体图(参见 Virtual Entity Graph)中注册了一个实体
sensor1,并绑定了相关的能力与技能,此时 Sensor Manager 就可以注册这个实体的传感器设备,并进行数据采集服务启动,事件注册等,并提供数据采集接口供上层应用使用。 - 传感器事件系统(Sensor Event System):TODO。事件与回调等,例如传感器报告了新的数据。
- 数据处理(Data Processing):TODO。
- 基础认知:(语义地图(Semantic Map)?? VEG 应该放在哪里 ??VEG 感觉是一个涉及到多个模块的东西,应该单独拿出来)
在传感器抽象模型中,以统一的坐标系来标识数据,规定为 采集点 的正面朝向为 +X 方向,左侧为 +Y 方向,上方为 +Z 方向。(之后需要定义好抽象传感器之间的数据约定)。
与其他模块的数据与控制交互
- 【感知模块】从 【VEG】 中选择对应的实体,注册为 sensor model 的实例,启动相关数据服务,此时需要从 VEG 获取能力/技能绑定等信息。
- 【感知模块】同样需要更新 VEG 中的实体信息(例如自动生成的房间关系,object 与 label 等),VEG 就是语义地图。事件驱动 ?获取 label 和 3D bbox 属于 “认知”,所以这里是把收集的数据发给【认知模块】。
- 【感知模块】提供管理接口给【管理模块】,例如目前注册的 sensor model 实例的状态,资源占用情况,用于管理模块进行调度,管理模块发送控制指令。
控制模块(Control Module)
控制模块在系统中和感知模块位于逻辑上的一层,感知模块负责收集数据,控制模块负责执行硬件动作。同理控制模块通过能力/技能驱动框架注册执行器模型(Actor Model)的实例。
定义
✤ 执行器模型(Actor Model):是指对机器人硬件的一种抽象,通过抽象模型实现机器人硬件的统一控制。
执行期抽象模型包括以下硬件模型:
- 运动执行器(Motion Actor):移动、旋转、升降、姿态控制等,小车/无人机,……。(姿态控制的具体算法——即能力——由厂家提供)
- 交互执行器(Interaction Actor):语音对话,文本交互,UI 交互的硬件。
- 抓取执行器(Grasp Actor):抓取、放置、夹取等,机械臂、智能手。
- TODO
对于每个执行器模型,提供对应的抽象接口,认知模块规划好动作后,控制指令发给控制模块执行。
定义
✤ 交互(Interaction):是指与机器人硬件的交互,包括语音对话,文本交互,UI 交互等。
✤ 快慢分层交互(Fast and Slow Interaction):是指支持快路径交互,如传统的控制台输入(shell),然后执行相关代码快速反馈,也支持长路径(经过大模型等)的长时交互(例如语音转文字,VLM推理等)。
快慢分层交互要求各个交互是并发的。
认知模块(Cognition Module)
认知模块的任务是接收从感知模块传入的数据,并通过算法或大模型进行处理和理解,并进行动作规划,最终将动作规划结果发给控制模块执行。
认知模块包括:
- vLLM 管理器,微调接口(将 robonix 的整个数据流和 vLLM 的训练和微调对接)。
- 任务评估模拟器:如 webots,genesis。
- 符号执行器:Action 程序。
- 记忆管理器:记忆(Memory)管理。
flowchart LR
classDef module fill:#eef5ff,stroke:#5b8def,stroke-width:1px,corner-radius:6px,color:#000,font-size:17px;
classDef simulate fill:#f0fdf4,stroke:#16a34a,stroke-width:1px,corner-radius:6px,color:#000,font-size:17px;
classDef io fill:#f8f9fa,stroke:#aaa,stroke-width:1px,color:#000,font-size:16px;
A[用户指令<br/>环境输入]:::io
B[<strong>感知模块(Sensing)</strong><br/>更新语义地图 VEG]:::module
C[<strong>认知模块(Cognition)</strong><br/>vLLM 生成 Action]:::module
D[<strong>管理模块(Management)</strong><br/>资源管理 / 安全策略]:::module
E[仿真评估<br/>Webots]:::simulate
F[<strong>控制模块(Control)</strong><br/>执行真实硬件动作]:::module
G[执行结果<br/>环境变化]:::io
A --> B --> C --> D --> E --> F --> G
G -. Feedback .-> B
E -. Feedback .-> C
管理模块(Management Module)
互联模块(Networking Module)
TODO
内核与中间件层(Kernel and Middleware Layer)
提供 robonix linux(定制内核与发行版软件)与 robonix ROS2(定制 ROS2 软件),支持系统级集成,包括从 linux kernel、ROS2 到 robonix 的数据通路和控制通路实现。
参考文献
[1] Sensors Overview - Android Developers. URL: https://developer.android.com/develop/sensors-and-location/sensors/sensors_overview.
[2] Quentin Garrido, Mahmoud Assran, Nicolas Ballas, Adrien Bardes, Laurent Najman, and Yann LeCun. Learning and Leveraging World Models in Visual Representation Learning. arXiv preprint arXiv:2403.00504, 2024. URL: https://arxiv.org/abs/2403.00504.
本文信息
- 作者列表:
wheatfox <wheatfox17@icloud.com>
- 最后更新:
2025-10-10- 许可证: CC BY-SA 4.0
感知层设计
本文信息
- 作者列表:
wheatfox <wheatfox17@icloud.com>
- 最后更新:
2025-10-10- 许可证: CC BY-SA 4.0
联网层设计
本文信息
- 作者列表:
wheatfox <wheatfox17@icloud.com>
- 最后更新:
2025-10-10- 许可证: CC BY-SA 4.0
认知层设计
本文信息
- 作者列表:
wheatfox <wheatfox17@icloud.com>
- 最后更新:
2025-10-10- 许可证: CC BY-SA 4.0
控制层设计
本文信息
- 作者列表:
wheatfox <wheatfox17@icloud.com>
- 最后更新:
2025-10-10- 许可证: CC BY-SA 4.0
Capability 与 Skill 框架设计
本文信息
- 作者列表:
wheatfox <wheatfox17@icloud.com>
- 最后更新:
2025-10-10- 许可证: CC BY-SA 4.0