robonix 系统架构设计
- EHAL 层(Embodied Hardware Abstraction Layer)
- 感知模块(Sensing Module)
- 控制模块(Control Module)
- 认知模块(Cognition Module)
- 管理模块(Management Module)
- 互联模块(Networking Module)
- 内核与中间件层(Kernel and Middleware Layer)
- 参考文献
具身智能是指具身身体执行动作与环境交互,感知外部环境,并通过大脑进行持续学习、决策规划的能力。随着2023 年以来大语言模型与机器人的深度融合,基于视觉语言动作(Vision Language Model,VLA)模型的具身智能快速发展,然而目前的 VLA 存在一系列问题:
- 模型训练和具体的具身硬件绑定,更换底层硬件就会使得模型失效,需要重新训练;
- 软件控制算法、驱动代码与硬件绑定,代码不具有可迁移性,难以复用。专家式地“面向ROS包编程”;
- VLA 对执行复杂任务的支持不足,缺乏复杂任务规划能力;
- 硬件能力与资源无法共享,具身应用存在相互影响的现象(例如大语言模型的推理会导致 SLAM 运行缓慢导致任务失败)。
为了解决目前具身智能系统中所出现的相关问题,Syswonder 社区开发了面向多场景的模块化具身智能操作系统—— robonix,代码主页位于 https://github.com/syswonder/robonix。robonix 的核心设计理念包括以下几点:
- 硬件解耦:通过具身硬件抽象,将具体的硬件抽象为能力(Capability)和技能(Skill)的提供者。robonix 通过硬件解耦实现系统在不同硬件的可迁移性;
- 软件抽象:对上层应用用户和开发者提供系统接口(API),开发者通过编写动作(Action)程序的方式使用系统提供的各种硬件与软件资源。robonix 通过软件抽象的方式提供具身软件开发生态;
- 资源管理:通过对系统内注册过的硬件能力进行管理和调度,提供高并发具身应用的稳定运行支持,提高资源利用率;
- 感联知控:
- 感:提供标准的数据输入框架,包括传感器设备模型、数据采集与整理等模块;
- 联:提供系统级数据总线支持,通过整合 Linux 与 ROS2 实现多机时间戳同步等功能;
- 知:认知部分通过提供语义地图框架、大语言模型 Agent 支持、大语言模型加载支持、基于模拟器和世界模型(World Model) [2]的动作评估,来实现系统级任务规划;
- 控:提供标准的控制框架,包括控制器设备模型,控制接口等模块。
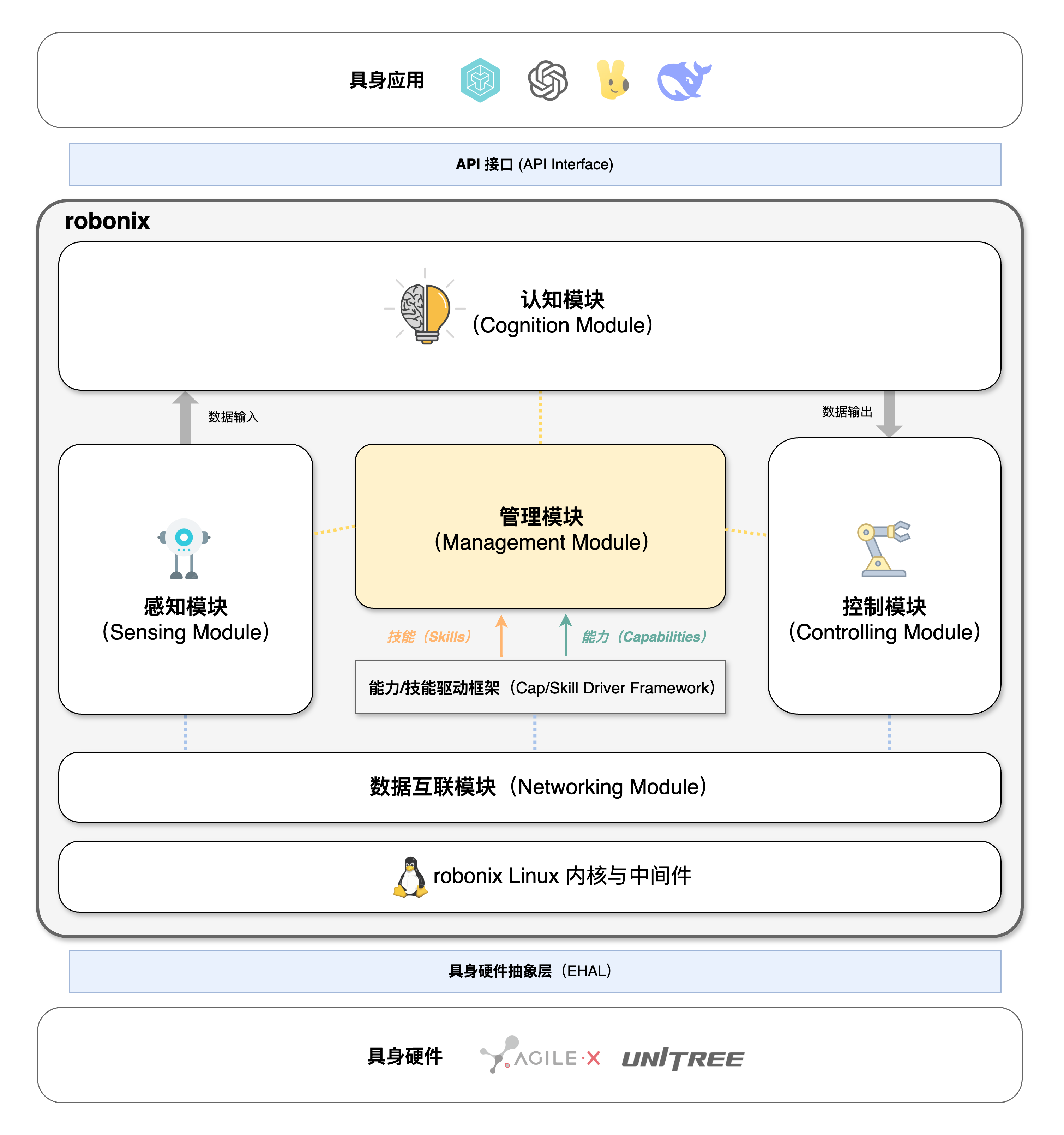
robonix 的系统架构如下图所示:
EHAL 层(Embodied Hardware Abstraction Layer)
EHAL 层是 robonix 的核心抽象之一,其由能力(Capability)和技能(Skill)组成。
定义
✤ 能力(Capability):是指针对某一个机器人硬件,其所提供的与硬件相关的能力;
✤ 技能(Skill)是指通过组合调用若干能力与其他技能所实现的软件算法和逻辑,与硬件无关。
类比 Linux 或 Android 的厂家驱动,能力与技能由对应的厂家开发实现,在开发时对接图中的 能力/技能驱动框架(Capability/Skill Driver Framework),在运行时由 robonix 管理模块进行调度。该驱动框架是上层感知模块和控制模块与底层 EHAL 的接口。
感知模块(Sensing Module)
正如 Android 未来统一各种不同感知硬件而设计的传感器框架 [1],同理,robonix 同样需要一个感知模块来实现:
- 对 EHAL 提供的能力与技能的整理;
- 感知数据的输入和预处理、预认知;
- 向上(感知模块)、向内(管理模块)提供数据与控制接口。
感知模块将会提供一系列规范的 传感器模型(Sensor Model):
- 运动传感器(Motion Sensor):提供机器人的运动状态数据,包括位置、速度、加速度、位姿,里程(Odometry)等;
- 环境传感器(Environment Sensor):提供机器人周围环境数据,包括光照、温度、湿度、气压、海拔等;
- 距离传感器(Distance Sensor):提供机器人与周围物体之间的距离数据,包括超声、激光、毫米波等;
- 视觉传感器(Vision Sensor):提供机器人的视觉数据,包括图像、视频等;
- 音频传感器(Audio Sensor):提供机器人的音频数据,包括对音频的监听和采样等;
- 力传感器(Force Sensor):提供机器人的力数据,包括触摸、压力等;
- 其他传感器(Other Sensor):TODO。
定义
✤ 传感器模型(Sensor Model):是指对传感器物理硬件的一种虚拟抽象,通过抽象模型实现传感器数据的统一处理和标准化输出。
感知模块的组成:
- 传感器管理器(Sensor Manager):负责管理传感器设备,包括传感器设备的注册、注销、数据采集、硬件参数配置等,例如我们在实体图(参见 Virtual Entity Graph)中注册了一个实体
sensor1,并绑定了相关的能力与技能,此时 Sensor Manager 就可以注册这个实体的传感器设备,并进行数据采集服务启动,事件注册等,并提供数据采集接口供上层应用使用。 - 传感器事件系统(Sensor Event System):TODO。事件与回调等,例如传感器报告了新的数据。
- 数据处理(Data Processing):TODO。
- 基础认知:(语义地图(Semantic Map)?? VEG 应该放在哪里 ??VEG 感觉是一个涉及到多个模块的东西,应该单独拿出来)
在传感器抽象模型中,以统一的坐标系来标识数据,规定为 采集点 的正面朝向为 +X 方向,左侧为 +Y 方向,上方为 +Z 方向。(之后需要定义好抽象传感器之间的数据约定)。
与其他模块的数据与控制交互
- 【感知模块】从 【VEG】 中选择对应的实体,注册为 sensor model 的实例,启动相关数据服务,此时需要从 VEG 获取能力/技能绑定等信息。
- 【感知模块】同样需要更新 VEG 中的实体信息(例如自动生成的房间关系,object 与 label 等),VEG 就是语义地图。事件驱动 ?获取 label 和 3D bbox 属于 “认知”,所以这里是把收集的数据发给【认知模块】。
- 【感知模块】提供管理接口给【管理模块】,例如目前注册的 sensor model 实例的状态,资源占用情况,用于管理模块进行调度,管理模块发送控制指令。
控制模块(Control Module)
控制模块在系统中和感知模块位于逻辑上的一层,感知模块负责收集数据,控制模块负责执行硬件动作。同理控制模块通过能力/技能驱动框架注册执行器模型(Actor Model)的实例。
定义
✤ 执行器模型(Actor Model):是指对机器人硬件的一种抽象,通过抽象模型实现机器人硬件的统一控制。
执行期抽象模型包括以下硬件模型:
- 运动执行器(Motion Actor):移动、旋转、升降、姿态控制等,小车/无人机,……。(姿态控制的具体算法——即能力——由厂家提供)
- 交互执行器(Interaction Actor):语音对话,文本交互,UI 交互的硬件。
- 抓取执行器(Grasp Actor):抓取、放置、夹取等,机械臂、智能手。
- TODO
对于每个执行器模型,提供对应的抽象接口,认知模块规划好动作后,控制指令发给控制模块执行。
定义
✤ 交互(Interaction):是指与机器人硬件的交互,包括语音对话,文本交互,UI 交互等。
✤ 快慢分层交互(Fast and Slow Interaction):是指支持快路径交互,如传统的控制台输入(shell),然后执行相关代码快速反馈,也支持长路径(经过大模型等)的长时交互(例如语音转文字,VLM推理等)。
快慢分层交互要求各个交互是并发的。
认知模块(Cognition Module)
认知模块的任务是接收从感知模块传入的数据,并通过算法或大模型进行处理和理解,并进行动作规划,最终将动作规划结果发给控制模块执行。
认知模块包括:
- vLLM 管理器,微调接口(将 robonix 的整个数据流和 vLLM 的训练和微调对接)。
- 任务评估模拟器:如 webots,genesis。
- 符号执行器:Action 程序。
- 记忆管理器:记忆(Memory)管理。
flowchart LR
classDef module fill:#eef5ff,stroke:#5b8def,stroke-width:1px,corner-radius:6px,color:#000,font-size:17px;
classDef simulate fill:#f0fdf4,stroke:#16a34a,stroke-width:1px,corner-radius:6px,color:#000,font-size:17px;
classDef io fill:#f8f9fa,stroke:#aaa,stroke-width:1px,color:#000,font-size:16px;
A[用户指令<br/>环境输入]:::io
B[<strong>感知模块(Sensing)</strong><br/>更新语义地图 VEG]:::module
C[<strong>认知模块(Cognition)</strong><br/>vLLM 生成 Action]:::module
D[<strong>管理模块(Management)</strong><br/>资源管理 / 安全策略]:::module
E[仿真评估<br/>Webots]:::simulate
F[<strong>控制模块(Control)</strong><br/>执行真实硬件动作]:::module
G[执行结果<br/>环境变化]:::io
A --> B --> C --> D --> E --> F --> G
G -. Feedback .-> B
E -. Feedback .-> C
管理模块(Management Module)
互联模块(Networking Module)
TODO
内核与中间件层(Kernel and Middleware Layer)
提供 robonix linux(定制内核与发行版软件)与 robonix ROS2(定制 ROS2 软件),支持系统级集成,包括从 linux kernel、ROS2 到 robonix 的数据通路和控制通路实现。
参考文献
[1] Sensors Overview - Android Developers. URL: https://developer.android.com/develop/sensors-and-location/sensors/sensors_overview.
[2] Quentin Garrido, Mahmoud Assran, Nicolas Ballas, Adrien Bardes, Laurent Najman, and Yann LeCun. Learning and Leveraging World Models in Visual Representation Learning. arXiv preprint arXiv:2403.00504, 2024. URL: https://arxiv.org/abs/2403.00504.
本文信息
- 作者列表:
wheatfox <wheatfox17@icloud.com>
- 最后更新:
2025-10-10- 许可证: CC BY-SA 4.0