Robonix 开发者指南
- 1. 5 分钟上手
- 2. Robonix 是什么
- 3. 原语 / 服务 / 技能 与 Capability
- 4. 能力约定
- 5. 生命周期
- 6. 包结构
- 7. API 速览
- 8. 服务
- 9. 原语
- 10. 技能
- 11. 部署目录
- 12. 部署清单
- 13. 启动
- 14. Python API
- 15. CLI
- 16. 配置字段
本指南内容所对应的上游 robonix 仓库 commit:syswonder/robonix:dev@0ba783d(2026-05-12 dev 分支 HEAD)。
面向:写 service / skill / primitive 的开发者。
概念:原语 / 服务 / 技能 是三类独立运行的能力提供者(带 lifecycle);它们对外暴露的 Capability 是 contract + transport + endpoint 的接口描述。Python 里就是
Primitive/Service/Skill三个类。
阅读路径:
- Part I 入门(§1-§2):跑通最小部署,建立全局印象
- Part II 核心概念(§3-§5):原语/服务/技能 / 能力约定 / 生命周期
- Part III 开发(§6-§10):包结构 / API 速览 / 写服务 / 写原语 / 写技能
- Part IV 部署(§11-§13):部署目录 / 部署清单 / 启动
- Part V 参考(§14-§16):Python API / CLI / 配置字段
Part I — 入门
1. 5 分钟上手
前置:Rust 1.86+(含 cargo,确保 ~/.cargo/bin 在 PATH,没装就 source ~/.cargo/env)/ Python 3.10+ / Docker / uv。
# 1. 装工具链
git clone --recurse-submodules https://github.com/syswonder/robonix
cd robonix/rust && make install
rbnx --version
# 2. 克隆部署模板
git clone https://github.com/enkerewpo/template_rbnx ~/my_deploy
cd ~/my_deploy
# 3. VLM 凭据(pilot 用)
export VLM_API_KEY=sk-...
export VLM_BASE_URL=https://api.openai.com/v1
export VLM_MODEL=gpt-4o-mini
# 4. build + boot
rbnx build && rbnx boot
rbnx boot 跑完停在 ✓ N component(s) up。开新终端:
rbnx caps -v # 4 system + mock_chassis / my_navigate / say_hello
rbnx chat # 试 "say hello to alice"
Ctrl-C 杀 rbnx boot,所有能力提供者自动清理并退出。跑通后跳 §8 写自己的服务,或 §2 看整体设计。
2. Robonix 是什么
机器人系统的功能天然分散——驱动、SLAM、导航、决策各是一个独立单元,需要互相发现、调用、可独立替换。Robonix 给这套协调一个最小骨架:三类能力提供者(原语 / 服务 / 技能)+ 一个目录服务(atlas)+ 一份接口形状(contract)。
skill explore / say_hello / ...
| (LLM-triggered tasks)
v
service mapping / nav / scene / memory
| (robot-level algorithms)
v
primitive chassis / camera / lidar / audio
(1 物理设备 = 1 primitive)
几个核心机制协同工作(详见 Part II):
- 原语 / 服务 / 技能:三类独立运行的能力提供者,Python 里写为
Primitive(id, ns)/Service(...)/Skill(...),挂 lifecycle、装饰器、对外暴露若干 Capability。 - Capability:能力提供者对外暴露的一条接口(contract + transport + endpoint)。一个能力提供者可同时暴露多条(
tiago_camera→rgb+depth+extrinsics)。 - Atlas:能力提供者启动时把“我是谁、暴露什么、在哪“注册过来;别人通过它发现 + 寻址。没有 Atlas 就要硬编码地址。
- Contract:Capability 的形状(toml + ROS IDL)。换实现不动能力约定。
剩下的章节都是落地细节。Robonix 内部还跑 pilot / executor / liaison 等系统服务。
Robonix 是 EAIOS(Embodied AI Operating System)v0.1 白皮书的开源参考实现。
Part II — 核心概念
3. 原语 / 服务 / 技能 与 Capability
3.1 三类能力提供者
| 类型 | namespace 前缀(例) | 定义 |
|---|---|---|
| primitive(原语) | robonix/primitive/<kind> | 对单一物理设备的硬件抽象,封装其不可再分解的原子操作集。<kind> ∈ {audio, camera, chassis, imu, lidar}(封闭) |
| service(服务) | robonix/service/<x> | 由操作系统统一注册、调度与管理的标准化功能模块 |
| skill(技能) | robonix/skill/<x> | 封装特定语义功能的可复用行为序列,由 LLM / 状态机触发 |
第三方实验可用 myorg/... 自前缀,atlas 不强制 robonix/。robonix/system/ 是 robonix 自带组件保留前缀。
3.2 定义
| 含义 | Python | 生命周期 | |
|---|---|---|---|
| 原语 / 服务 / 技能 | 一个独立运行的能力提供者 | service = Service(id="my_navigate", namespace=...) | REGISTERED → INACTIVE → ACTIVE → ...(见 §5) |
| Capability | 能力提供者暴露的一条接口 (contract_id, transport, endpoint, params, description),Pilot 大模型在 prompt 里看到的就是这些 | @service.mcp(...) / @service.grpc(...) / service.declare_ros2_topic(...) 等装饰器/方法 | 跟随能力提供者 |
id 是该能力提供者在 atlas 里的唯一 id(audio_driver / tiago_chassis / my_navigate);Capability 没有自己的 id,只通过 (provider_id, contract_id) 寻址。
3.3 包
静态构建/分发单元——目录、manifest、(可选)docker。运行时启动为一个能力提供者。
package.name 用反向域名(com.org.foo)做发布身份;能力提供者 id 是运行时身份,由 Python 源里 Primitive/Service/Skill(id="...") 声明。两者不必相同。rbnx boot 在 spawn 包之后 poll atlas 拿到新注册的能力提供者,跟 robonix_manifest.yaml 里挂这个包的 name: 对账(两处必须一致)。包结构详见 §6。
3.4 Atlas 目录服务
中心目录服务(gRPC,端口 50051)。能力提供者启动时按 kind 调 RegisterPrimitive / RegisterService / RegisterSkill,之后每条接口调 DeclareCapability。其它能力提供者调 Query(ATLAS.query_primitives/_services/_skills,返回能力提供者记录列表)或 find_capability(扁平展开到 Capability 列表)拿 endpoint。Atlas 不传业务数据,只传“谁在哪里能干什么“。
4. 能力约定
4.1 定义
原语/服务/技能暴露的细粒度接口。可类比硬件接口规格书:定义“能做什么 + 数据是什么形状“,与具体实现解耦。一条能力约定由三件东西组成:
| 件 | 文件 | 决定 |
|---|---|---|
| toml | capabilities/<...>.v1.toml | 接口 ID + mode + IDL 引用 |
| IDL | capabilities/lib/<lib_name>/{msg,srv}/<Name> | 数据类型(ROS IDL,msg/srv 文件) |
| 实现 | python 装饰器 / publisher | 运行时绑定 |
mode 决定语义(rpc / topic / streaming),框架据此选 transport。具体编写步骤见 §8.5。
4.2 模式(Mode)与传输(Transport)
能力约定 toml 的 [mode] type 描述抽象语义(与具体协议无关);传输是落地协议。一个模式可被多种传输实现。
抽象 mode:
| mode | 语义 |
|---|---|
rpc | 单次请求 / 单次响应 |
rpc_server_stream | 请求 → 响应流 |
rpc_client_stream | 请求流 → 响应 |
rpc_bidirectional_stream | 双向流 |
topic_out | 该能力持续 publish 这条 topic |
topic_in | 该能力持续 subscribe 这条 topic(典型:chassis 声明它消费 Twist 命令) |
transport × mode 兼容矩阵:
| mode \ transport | gRPC | ROS 2 | MCP |
|---|---|---|---|
rpc | ✓ | ✓ ¹ | ✓ |
rpc_server_stream | ✓ | ✗ | ✗ |
rpc_client_stream | ✓ | ✗ | ✗ |
rpc_bidirectional_stream | ✓ | ✗ | ✗ |
topic_out | ✓ ² | ✓ | ✗ |
topic_in | ✓ ² | ✓ | ✗ |
| endpoint 形式 | host:port | topic 名 + QoS | HTTP URL |
¹ ROS 2 通过 service 实现 rpc,请求/响应一对一。
² gRPC 上的 topic_* = 用 server/client streaming 把“持续 publish/subscribe“伪装成一次性 RPC——典型用途是跨网络 / 跨语言、ROS 2 不可达时的退路。
为什么是 topic_in / topic_out、不是无方向的 topic
后缀刻画的是声明者(能力提供者)的角色,不是数据的物理流向:
topic_out— 能力提供者是 source,consumer 反向拿 endpoint 去 subscribe(典型:lidar 声明/scan)。topic_in— 能力提供者是 sink,consumer 反向拿 endpoint 去 publish(典型:chassis 声明/cmd_vel)。
去掉方向后会失去两件不可替代的信息:(1) gRPC fallback 的 codegen 没法决定生成 server-stream 还是 client-stream(见上脚注 ²);(2) consumer 拿到 endpoint 后不知道自己该 pub 还是 sub,atlas 的“指路“语义就缺一半。多对多 pub/sub(/tf 这种)的解法是每个 publisher 各自声明一条 topic_out Capability,全指同一个 topic 名;不需要新 mode。
经验法则:
- LLM 要调的工具 →
rpc+ MCP - 一般 service ↔ service / skill ↔ service 调用 →
rpc+ gRPC - 高频流式数据(传感器、控制)→
topic_out+ ROS 2 - 长时任务进度推送(LLM 不直接消费,但 service 间需要)→
rpc_server_stream+ gRPC
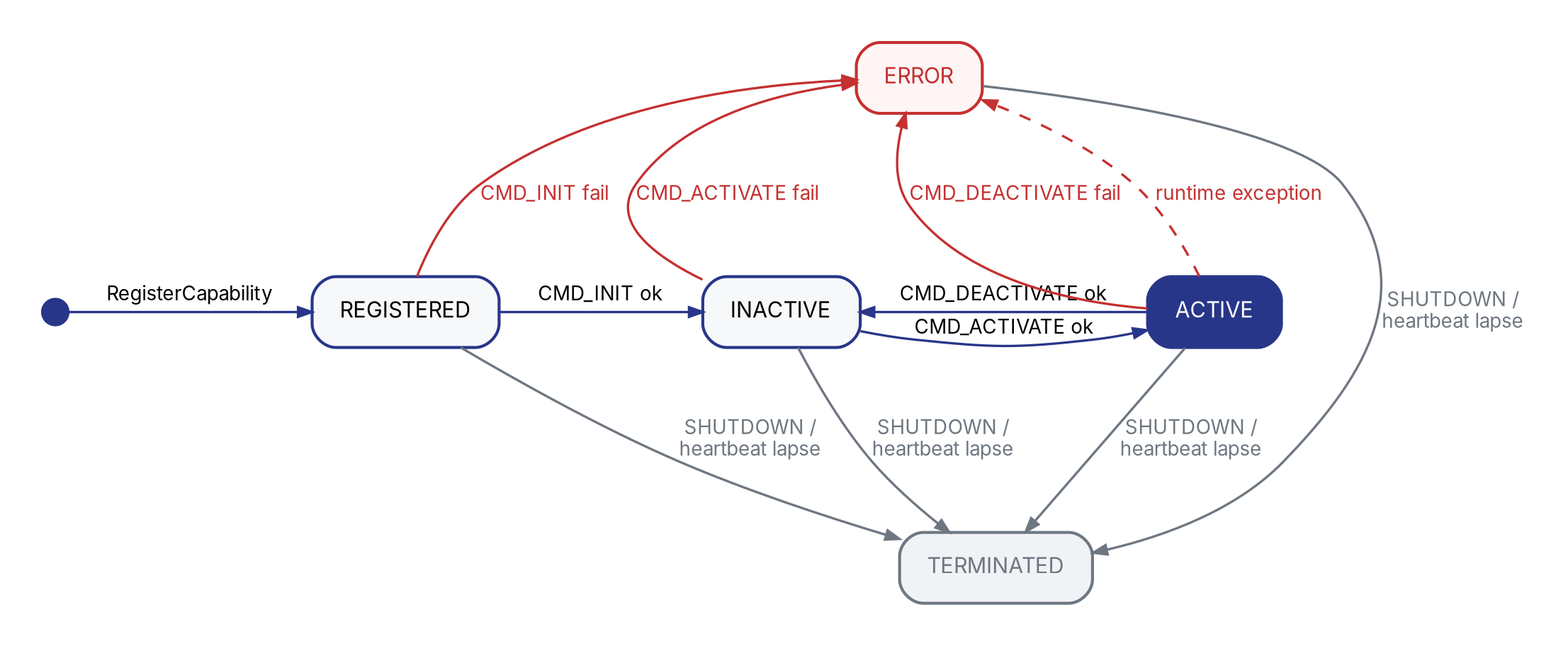
5. 生命周期
 {width=100%}
{width=100%}
5.1 状态
| 状态 | 含义 | 可调它的 Capability |
|---|---|---|
REGISTERED | atlas 已建档,但还没初始化 | ✗ |
INACTIVE | 已初始化(参数 / 上游依赖),但热资源未就位 | ✗ |
ACTIVE | 热资源就位,对外服务 | ✓ |
ERROR | handler 返回 Err() 或 raise | ✗ |
TERMINATED | 已退出 / 被驱逐——终态 | ✗ |
5.2 三类能力提供者的状态迁移
| 能力提供者类型 | boot 后停在哪 | 谁推到 ACTIVE |
|---|---|---|
| Primitive | ACTIVE | rbnx boot 紧跟 CMD_INIT 自动续发 CMD_ACTIVATE |
| Service | ACTIVE | 同 primitive |
| Skill | INACTIVE | executor 在 LLM 首次路由到该 skill 时发 CMD_ACTIVATE;idle 后可发 CMD_DEACTIVATE 回 INACTIVE |
通用规则:
- 任意状态下,handler 返
Err()/ raise →ERROR - SIGTERM /
CMD_SHUTDOWN/ 心跳 90s 失联 →TERMINATED
handler 实现见 §14.3。
Part III — 开发
6. 包结构
template_rbnx 里三个包正好覆盖典型差别。
6.1 service 包
my_navigate/
├── package_manifest.yaml 包元数据 + 要 declare 的 contract 清单
├── scripts/
│ ├── build.sh 调 rbnx codegen 生 stubs
│ └── start.sh 起能力提供者的命令(python -m my_navigate.main)
└── my_navigate/ 放源码的目录,robonix 不关心代码目录结构,直接调用 start.sh
├── __init__.py
└── main.py ★ 入口:构造能力提供者 + 装饰器
没有 capabilities/ 子目录——my_navigate 要 declare 的 4 条 robonix/service/navigation/* contract 已经在 robonix 源码的全局 capabilities/ 里定义好了,本包只是实现它们(详见 §6.4)。
6.2 skill 包
say_hello/
├── package_manifest.yaml
├── scripts/{build.sh, start.sh}
├── say_hello_skill/
│ ├── __init__.py
│ └── main.py
└── capabilities/ ★ 包私有 contract 定义
├── lib/say_hello/srv/SayHello.srv ROS IDL 类型
├── say_hello.v1.toml contract 描述(MCP 工具)
└── driver.v1.toml contract 描述(lifecycle 入口)
skill 通常是全新功能,没有现成 contract 可用,所以在自己的 capabilities/ 里定义。
6.3 primitive 包
mock_chassis/
├── package_manifest.yaml
├── scripts/{build.sh, start.sh}
└── mock_chassis/
├── __init__.py
└── main.py
primitive 包的目录形态和 service 一样。怎么把硬件 / 厂商 SDK 装起来由开发者自己定——可以在本地 venv 里跑、也可以让 start.sh 调 docker run 起容器、也可以 ssh 到机器人主机起。框架不关心实现,只看 start.sh 拉起来的进程能不能注册进 atlas。模板里 mock_chassis 给了一个走 docker 的例子,仅供参考(包含 docker/Dockerfile 等额外文件)。
6.4 package_manifest.yaml
以 services/my_navigate/package_manifest.yaml 为例(注释逐行):
manifestVersion: 1
package:
name: com.example.template.my_navigate # 反向域名,发布身份;与运行时 id 是两码事
version: 0.1.0
vendor: example
license: MIT
build: bash scripts/build.sh
start: bash scripts/start.sh
capabilities: # 要 declare 的 contract(全 / 本地都可,codegen 合并搜索)
- name: robonix/service/navigation/driver
- name: robonix/service/navigation/navigate
- name: robonix/service/navigation/status
- name: robonix/service/navigation/cancel
skill 会同时引用全局 lifecycle contract 和自定义 contract——见 skills/say_hello/package_manifest.yaml。
6.5 capabilities/ 目录
整个系统有两种 capabilities/ 目录(robonix 全局只有 1 份;包私有的每个包各 1 份):
| 位置 | 谁维护 | 装什么 |
|---|---|---|
<robonix-repo>/capabilities/ | robonix 上游 | primitive 标准族(chassis/camera/lidar/audio)、所有 system 服务接口、内置共享 service 接口(navigation/map/scene/memory…)、跨包 ROS IDL 类型库(lib/) |
<your-pkg>/capabilities/ | 你自己 | 该包私有的额外 contract(skill 自定义工具最常见) |
rbnx codegen 扫描两种根合并,得到当前包能引用的 contract 全集。合并规则:toml / IDL 同 id 包内覆盖全局(用于本地试改);包内 capabilities/lib/ 的 ROS IDL 也对自己可见。
何时建本地 capabilities/:
| 你要 declare 的 contract | 它在哪 | 要建本地 capabilities/ 吗? |
|---|---|---|
robonix/primitive/chassis/move | robonix 全局 | 不需要 |
robonix/service/navigation/navigate | robonix 全局 | 不需要 |
robonix/skill/say_hello/say(自定义 skill 工具) | 没有,自己定义 | 需要 |
| 自家私有 service 接口(暂不上游) | 没有,自己定义 | 需要 |
7. API 速览
写原语/服务/技能 用的 Python 库就是 robonix_api。下面是后续 §8-§10 所有代码示例里会出现的 API,先有印象就行——完整签名 + 机制 + 多 mode 写法见 §14。
from robonix_api import Service, Ok, Err, ATLAS
from robonix_api.atlas_types import Transport, Channel
from myorg_mcp import Hello_Request, Hello_Response # codegen dataclass
service = Service(id="my_service", namespace="robonix/service/myorg")
# Hot resources — only touched between on_activate / on_deactivate.
chassis_ch: Channel | None = None
@service.on_init
def init(cfg: dict):
# Light: 读 cfg、向 atlas 探活上游;不开连接、不占资源。
if not ATLAS.find_capability(
contract_id="robonix/primitive/chassis/move",
transport=Transport.GRPC,
):
return Err("no chassis candidate online")
return Ok()
@service.on_activate
def activate():
# Heavy: 拿上游 endpoint、起线程、加载模型——只有进入 ACTIVE 时才做。
global chassis_ch
cap_view = ATLAS.find_unique_capability(
contract_id="robonix/primitive/chassis/move",
transport=Transport.GRPC,
)
chassis_ch = service.connect_capability(
cap_view, "robonix/primitive/chassis/move", Transport.GRPC,
)
return Ok()
@service.on_deactivate
def deactivate():
# 对称释放 on_activate 申请的所有资源。
global chassis_ch
if chassis_ch is not None:
chassis_ch.close()
chassis_ch = None
return Ok()
@service.mcp("robonix/service/myorg/hello")
def hello(req: Hello_Request) -> Hello_Response:
"""打招呼。docstring 即工具描述,pilot 喂给 LLM。"""
return Hello_Response(message=f"hello {req.name}")
if __name__ == "__main__":
service.run()
| API | 作用 |
|---|---|
service = Service(id, namespace)(或 primitive = Primitive(...) / skill = Skill(...)) | 在文件顶部构造一个全局能力提供者,承载所有装饰器和方法。三个类按 package 类型选——它们的 lifecycle 语义、可暴露的 contract、executor 调度策略都有差异(详见 §3 / §5)。id 是 atlas 里该能力提供者的唯一 id,namespace 固定了之后所有接口 contract_id 的前缀(如 namespace=robonix/primitive/chassis,则之后声明的接口均以 robonix/primitive/chassis 开头) |
service.run() | 阻塞主循环:注册到 atlas、起 gRPC + MCP server、心跳、等 SIGTERM |
@service.on_init(fn) | 必填,REGISTERED→INACTIVE;输入配置,返回 Result |
@service.on_activate(fn) | INACTIVE→ACTIVE;skill 必填,primitive / service 可省(省时框架自动返 Ok());无输入,返回 Result |
@service.on_deactivate(fn) | ACTIVE→INACTIVE;同 on_activate 的规则;无输入,返回 Result |
@service.on_shutdown(fn) | 任意→TERMINATED;可选;无输入,返回 Result |
@service.mcp(contract_id, *, description="") | 把函数挂成 MCP 工具(LLM 直接调),描述默认取 docstring |
@service.grpc(contract_id, *, description="") | 把函数挂成 gRPC servicer 方法;gRPC 无 docstring 惯例,建议显式传 description |
ATLAS.query(*, kind=, id=, contract_id=, …) | 按条件搜原语/服务/技能记录(kind=UNSPECIFIED 时三类一起返回) |
ATLAS.query_primitives/_services/_skills(...) | query() 的 kind 已固定的快捷形式 |
ATLAS.find_capability(*, contract_id=, transport=, …) | 扁平视角——按 contract 搜,返回 list[Capability](每条 Capability 自带 provider_id / provider_kind) |
ATLAS.find_unique_capability(...) | 同上但断言只有一条;0 或 >1 都 raise(依赖唯一 capability 时用) |
service.connect_capability(cap_view, contract_id, transport) | 用一条 Capability 建一条 consumer→提供方的 Channel |
service.declare_ros2_topic | 把一个 ROS 2 topic publisher 在 atlas 里登记为某能力约定(详见 §14.8) |
service.declare_ros2_service | 把一个 ROS 2 service 在 atlas 里登记为某能力约定(详见 §14.8) |
Ok() / Err("...") | API提供的辅助结果“类型“,能力提供者的 lifecycle handler 返回这两种之一 |
最小可跑的能力提供者长这样——on_init 必填;on_activate / on_deactivate 对 primitive / service 可省(框架自动返 Ok()),skill 必须自己写:
from robonix_api import Service, Ok
service = Service(id="my_service", namespace="robonix/service/myorg")
@service.on_init
def init(cfg: dict):
return Ok()
@service.on_activate
def activate():
return Ok()
@service.on_deactivate
def deactivate():
return Ok()
if __name__ == "__main__":
service.run()
8. 服务
按“先 hello、再加上游探活、再加 connect、再加自定义 contract、最后给完整模板“的渐进式样例展开。每一节增量地解释新引入的 API,最后 §8.6 给可直接 copy 的完整 main.py + package_manifest.yaml。
8.1 最小骨架
四步:
- 复制
template_rbnx/services/my_navigate/到你的部署,改包名 - 改
package_manifest.yaml:package.name/capabilities[](只 declare robonix 全局已有的 contract 就不用建本地capabilities/);改 Python 源里Primitive/Service/Skill(id="...")的 id 跟robonix_manifest.yaml该条目的name:一致 - 写
<pkg>/<pkg>/main.py:按 package 类型构造一个能力提供者(Primitive/Service/Skill)+ lifecycle handlers + 装饰器 bash scripts/build.sh && bash scripts/start.sh
最小 main.py——on_init 必填;on_activate / on_deactivate 对 primitive / service 可省(省时框架自动 Ok()),下面这份模板把它们都写上方便你直接扩展:
from robonix_api import Service, Ok
from myorg_mcp import Hello_Request, Hello_Response # codegen 出来的 dataclass
service = Service(id="my_service", namespace="robonix/service/myorg")
@service.on_init
def init(cfg: dict):
return Ok()
@service.on_activate
def activate():
return Ok()
@service.on_deactivate
def deactivate():
return Ok()
@service.mcp("robonix/service/myorg/hello")
def hello(req: Hello_Request) -> Hello_Response:
return Hello_Response(message=f"hello {req.name}")
if __name__ == "__main__":
service.run()
service.run() 阻塞直到 SIGTERM;中间它做完了:atlas 注册 → declare interfaces → 起 gRPC + MCP server → 起心跳。
验证:
rbnx caps -v | grep my_service
8.2 atlas 探活
写真实 service 时,on_init 一般要先看上游依赖在不在。按 id 取:ATLAS.query(id=...) 返回一个 list(0 条 = 没有):
from robonix_api import Service, Ok, Err, ATLAS
@service.on_init
def init(cfg: dict):
if not ATLAS.query(id="tiago_chassis"):
return Err("chassis not online")
return Ok()
Err("...") 让能力提供者进 ERROR,reason 写入 state_detail,rbnx caps -v 看得到。完整 atlas 发现 API(按 contract 搜 / 多能力提供者处理)见 §14.4 / §14.5。
8.3 上游 connect
on_activate 阶段才做“申请热运行资源“——拿上游 endpoint、起 ROS subscription、加载模型、开线程。按 contract 搜对应的 Capability:ATLAS.find_capability(contract_id=..., transport=...) 返回 list[Capability];service.connect_capability(cap_view, contract_id, transport) 返回一个 Channel,里面 endpoint 是对方实际地址:
from robonix_api.atlas_types import Transport
chassis_endpoint: str | None = None # 模块级缓存
@service.on_activate
def activate():
global chassis_endpoint
cap_view = ATLAS.find_unique_capability(
contract_id="robonix/primitive/chassis/move",
transport=Transport.GRPC,
)
with service.connect_capability(
cap_view,
"robonix/primitive/chassis/move",
Transport.GRPC,
) as ch:
chassis_endpoint = ch.endpoint
return Ok()
with 块退出时自动 Disconnect。find_unique_capability 在 0 或 >1 匹配时 raise——依赖唯一 capability 时用它;多能力提供者场景用 find_capability 拿 list 自己挑。完整 connect 机制见 §14.6。
8.4 资源释放
on_activate 申请的资源必须有对称的 on_deactivate 释放——否则 executor evict 后再 activate 会泄漏:
@service.on_deactivate
def deactivate():
global chassis_endpoint
chassis_endpoint = None
return Ok()
8.5 自定义 contract
到 §8.4 为止你只用了 robonix 全局已有的 contract。如果你的 service 要暴露全新接口(带自己的 IDL),三步:
(1) 写 IDL — 按 ROS IDL(msg / srv 文件)放 <your-pkg>/capabilities/lib/<lib_name>/{msg,srv}/:
# <your-pkg>/capabilities/lib/myorg/srv/Hello.srv
string name
---
string message
<lib_name> 是 lib/ 下第一层子目录名(snake_case,如 myorg / camera / nav_msgs),codegen 生成的 <lib_name>_pb2.py / <lib_name>_mcp.py 模块名沿用。同一 <lib_name> 下并列 msg/ 和 srv/。.srv 中 --- 上方是 request、下方是 response;.msg 无 ---,整文件即字段列表。
⚠️ streaming mode 字段约束:
.srv流方向那一段必须恰 1 个字段(gRPC 一条流只能跑一种 message type);unary 方向不限。topic_*用.msg,整文件即流元素类型。违反 codegen 直接 bail。
mode request 字段数 response 字段数 rpc任意 任意 rpc_server_stream任意 =1 rpc_client_stream=1 任意 rpc_bidirectional_stream=1 =1
(2) 写 toml — 放 <your-pkg>/capabilities/ 任意深度子目录(不能进 lib/):
# <your-pkg>/capabilities/myorg/hello.v1.toml
[contract]
id = "robonix/service/myorg/hello"
version = "1"
kind = "service"
idl = "myorg/srv/Hello.srv" # 相对 lib/ 的路径
[mode]
type = "rpc" # 详见 §4.2
(3) 在代码里 declare — 把 contract_id 和你的实现绑定:
@service.mcp("robonix/service/myorg/hello") # contract_id 必须和 toml 的 [contract] id 一致
def hello(req: Hello_Request) -> Hello_Response:
return Hello_Response(message=f"hi {req.name}")
Codegen 产物:bash scripts/build.sh(包内默认调 rbnx codegen --mcp)扫描两种 capabilities/ 根生成到 <your-pkg>/rbnx-build/codegen/:
rbnx-build/codegen/
├── proto_gen/
│ ├── robonix_contracts.proto 所有 contract 合成的 proto
│ ├── robonix_contracts_pb2_grpc.py ★ 所有 contract 的 Stub / Servicer
│ ├── <lib_name>_pb2.py 每个 lib/ 子目录的 msg 类
│ └── ...
└── robonix_mcp_types/
└── <lib_name>_mcp.py 每个 lib/ 子目录的 dataclass(@service.mcp 用)
名字映射规则:
| 源 | 生成的名字 |
|---|---|
msg 文件:lib/<lib_name>/msg/Foo.msg | gRPC:<lib_name>_pb2.FooMCP: <lib_name>_mcp.Foo |
srv 文件:lib/<lib_name>/srv/Hello.srv | gRPC:<lib_name>_pb2.Hello_Request / Hello_ResponseMCP: <lib_name>_mcp.Hello_Request / Hello_Response |
contract id:robonix/service/myorg/hello(其 toml 引用 myorg/srv/Hello.srv) | gRPC service:RobonixServiceMyorgHelloServicer: robonix_contracts_pb2_grpc.RobonixServiceMyorgHelloServicerStub: robonix_contracts_pb2_grpc.RobonixServiceMyorgHelloStub方法名: Hello(按 IDL srv 文件名去 .srv) |
contract id:mycomp/a/b/c | gRPC service:MycompABC规则一致:每段按 / 切,段内 snake_case 转 PascalCase |
在代码里 import 这些生成产物:from robonix_api import ... 的那一刻,框架自动把 <pkg>/rbnx-build/codegen/proto_gen 和 robonix_mcp_types 加进 sys.path,所以不需要 sys.path.insert——直接和 robonix_api 一起在文件顶部 import:
from robonix_api import Service, Ok, Err, ATLAS
from robonix_api.atlas_types import Transport
from navigation_mcp import ( # MCP dataclass:用作 @service.mcp 函数签名
Navigate_Request, Navigate_Response,
)
import chassis_pb2_grpc # gRPC stub:用作 service.connect 拿到 endpoint 后建 client
import chassis_pb2 # gRPC 消息类
service = Service(id="my_navigate", namespace="robonix/service/navigation")
在 service / skill 里:你消费的 contract 来自上游 Capability → 用 service.connect_capability(...) + 上面 import 的 chassis_pb2_grpc.RobonixPrimitiveChassisMoveStub。你提供的 contract → 用装饰器 @service.mcp(...) / @service.grpc(...),签名里类型注解用 <lib_name>_mcp 里的 dataclass(MCP)或 <lib_name>_pb2 里的消息类(gRPC)。
8.6 完整模板
把 §8.1-§8.5 学到的合在一起——直接对接 robonix 全局的 service/navigation/* contract(不需要写自己的 IDL)。my_navigate/main.py:
# SPDX-License-Identifier: MulanPSL-2.0
"""my_navigate — minimal service.
- 暴露 robonix 全局的 service/navigation/navigate 这条 MCP 工具
- on_init 阶段在 atlas 里查 chassis primitive 是否在线
- on_activate 阶段拿一条 chassis/move 的 gRPC channel 留着发命令用
"""
from __future__ import annotations
import logging
import uuid
from robonix_api import Service, Ok, Err, ATLAS
from robonix_api.atlas_types import Transport
# Navigate_Request / Navigate_Response 是 codegen 从 robonix 全局的
# lib/navigation/srv/Navigate.srv 生成的 dataclass:
# geometry_msgs/PoseStamped goal ← 请求
# ---
# bool accepted ← 响应
# string goal_id
# string status_message
from navigation_mcp import Navigate_Request, Navigate_Response
# (1) 构造能力提供者:id 是 atlas 里该能力提供者的唯一 id,namespace 是要 declare 的 contract 公共前缀
service = Service(
id="my_navigate",
namespace="robonix/service/navigation", # 复用 robonix 全局 navigation 命名空间
)
log = logging.getLogger("my_navigate")
chassis_endpoint: str | None = None # 模块级缓存
# (2) lifecycle: REGISTERED -> INACTIVE
@service.on_init
def init(cfg: dict):
"""解析 config + 验证上游依赖。返回 Ok / Err。"""
log.info("init cfg=%s", cfg)
if not ATLAS.query(id="tiago_chassis"):
return Err("chassis not online")
return Ok()
# (3) lifecycle: INACTIVE -> ACTIVE(申请热资源)
@service.on_activate
def activate():
global chassis_endpoint
cap_view = ATLAS.find_unique_capability(
contract_id="robonix/primitive/chassis/move",
transport=Transport.GRPC,
)
with service.connect_capability(
cap_view,
"robonix/primitive/chassis/move",
Transport.GRPC,
) as ch:
chassis_endpoint = ch.endpoint
return Ok()
# (4) lifecycle: 回到 INACTIVE(释放热资源)
@service.on_deactivate
def deactivate():
global chassis_endpoint
chassis_endpoint = None
return Ok()
# (5) 暴露 MCP 工具——docstring 即工具的自然语言描述,pilot 喂给 LLM。
@service.mcp("robonix/service/navigation/navigate")
def navigate(req: Navigate_Request) -> Navigate_Response:
"""把底盘开到 goal 指定的 map 系位姿。LLM 决定调用时机;返回 goal_id
供后续 query / cancel 用。"""
pos = req.goal.pose.position
goal_id = str(uuid.uuid4())
log.info("navigate accepted goal=%s target=(%.2f, %.2f)", goal_id, pos.x, pos.y)
# 实际规划逻辑:通过 chassis_ch 发 gRPC 命令到底盘 primitive ……
return Navigate_Response(
accepted=True,
goal_id=goal_id,
status_message="stub planner accepted goal",
)
# (6) 阻塞主循环:注册 + declare + listen + heartbeat 全在里面
if __name__ == "__main__":
service.run()
配套 package_manifest.yaml(不需要本地 capabilities/,全用 robonix 全局 contract):
manifestVersion: 1
package:
name: com.org.my_navigate
version: 0.1.0
build: bash scripts/build.sh
start: bash scripts/start.sh
# 全部从 robonix 全局 capabilities/ 引用,自己不再 declare 新 contract
capabilities:
- name: robonix/service/navigation/driver
- name: robonix/service/navigation/navigate
- name: robonix/service/navigation/status
- name: robonix/service/navigation/cancel
每个 API 的详细签名 + 用法见 §14。
9. 原语
primitive 对应一个物理设备(一个相机、一个底盘、一台麦克风)。和 service 大体相同,差别如下:
namespace = "robonix/primitive/<kind>",<kind>∈ {audio,camera,chassis,imu,lidar}(封闭)- “能力提供者 id = device id” 约定:一个设备一个 primitive。3 个相机 → 3 个 primitive 能力提供者(
tiago_camera_front/tiago_camera_left/tiago_camera_right) - 怎么打包(本地 venv / docker / ssh 到机器人主机)由
scripts/start.sh决定——框架只看能力提供者进程能不能注册进 atlas。template_rbnx/primitives/mock_chassis/给了一个 docker 例子。
典型 lifecycle(同 service:on_init 必填,on_activate / on_deactivate 可省。下面这份模板把它们都写上方便扩展硬件资源管理):
primitive = Primitive(id="my_lidar", namespace="robonix/primitive/lidar")
@primitive.on_init
def init(cfg: dict):
# 轻量校验:cfg 字段、上游存在性
return Ok()
@primitive.on_activate
def activate():
# 起 rclpy node、加载模型、打开硬件 fd、起控制线程;同时 primitive.declare_ros2_topic / declare_ros2_service 把
# 暴露的 ROS topic 注册到 atlas(详见 §14.8)
return Ok()
@primitive.on_deactivate
def deactivate():
# 关 rclpy node / 关硬件 fd / 停控制线程;on_activate 申请的所有热资源在这里对称释放
return Ok()
声明 ROS topic 接口的写法见 §8.5 + §14.8。
10. 技能
skill = 一段被 LLM / 状态机触发的复合任务。和 service 不同点:
namespace = "robonix/skill/<x>"- 必须实现
@skill.on_activate+@skill.on_deactivate——它们是 executor 控制资源占用的入口,必然成对(eviction 策略可能反复 cycle) - skill boot 后停在
INACTIVE;首次 LLM 调用时 executor 发CMD_ACTIVATE推到ACTIVE - skill 通常通过
@skill.mcp暴露工具
硬性规定:每个原语 / 服务 / 技能必须有 driver.v1.toml,无例外——lifecycle 入口由这条 contract 描述,缺了 rbnx boot 没法发 CMD_INIT / CMD_ACTIVATE,executor 也没法路由 skill 激活命令。
framework 怎么找 driver:能力提供者启动时按 f"{self.namespace}/driver" 自动向 atlas declare 这条接口(capability.py:698);rbnx boot / executor / atlas 反向查找时只看一条规则——该能力提供者的 interface 列表里 contract_id 以 /driver 结尾的那一条(run_package.rs:722 等多处用 ends_with("/driver"))。也就是说,contract id 的整体格式 robonix 不强制——myorg/aaa/bbb/... 也行;强制的只是“该能力提供者 namespace 下必须有且只有一个 leaf 叫 driver“。
skill 没有现成的 driver contract 可借用,必须自己写一份;最快做法是从任意 primitive / service 的 driver.v1.toml 复制过来,把 [contract].id 改成 <你 skill 的 namespace>/driver——namespace 必须和 Skill(id=..., namespace=...) 里写的完全一致,否则 codegen 算出的 gRPC service name 和 runtime declare 的对不上:
# capabilities/driver.v1.toml
[contract]
id = "<your-namespace>/driver" # ← 必须 = Primitive/Service/Skill(...) 的 namespace + "/driver"
version = "1"
kind = "skill" # ← primitive / service / skill 据实填
idl = "lifecycle/srv/Driver.srv"
[mode]
type = "rpc"
idl 一律指向框架自带的 lifecycle/srv/Driver.srv,不要自创——所有能力提供者共享这一个 lifecycle 接口。kind 字段会被 atlas 用于 rbnx caps 的分类显示和 executor 的策略判断。
标准模式:
skill = Skill(id="myskill", namespace="robonix/skill/myskill")
@skill.on_init
def init(cfg: dict):
caps = ATLAS.find_capability(contract_id="robonix/service/navigation/navigate")
if not caps:
return Err("navigation service not found")
return Ok()
@skill.on_activate
def activate():
# spawn controller thread, load state machine
return Ok()
@skill.on_deactivate
def deactivate():
# release threads, unsubscribe
return Ok()
@skill.mcp("robonix/skill/myskill/run")
def run(req):
...
Part IV — 部署
11. 部署目录
本部分通过
template_rbnx这个最小部署模板把目录、manifest、能力约定的关系讲清。读完你应该能看懂一个部署的所有文件。
template_rbnx 是一个“空部署模板“:enkerewpo/template_rbnx。建议下面的章节边读边对着看真实文件。
template_rbnx/
├── robonix_manifest.yaml ★ 部署入口:rbnx boot 读这个,声明用哪些原语 / 服务 / 技能、各自的包在哪里、启动时的 config 参数(喂给 @service.on_init)
├── primitives/
│ └── mock_chassis/ 一个 primitive 包(能力提供者 id = mock_chassis,由其 main.py 的 Primitive(id=...) 声明)
├── services/
│ └── my_navigate/ 一个 service 包(能力提供者 id = my_navigate)
└── skills/
├── capabilities/
│ ├── lib/ 能力约定的 IDL 文件
│ ├── say_hello.v1.toml 能力约定定义
│ └── driver.v1.toml
└── say_hello/ 一个 skill 包(能力提供者 id = say_hello)
primitives/ / services/ / skills/ 是约定的子目录名,内部必须是若干个标准 Robonix 包的目录,robonix_manifest.yaml 里给每个包写 path: 显式指明所处的目录。
每个包内部长什么样见 §6 包结构。
12. 部署清单
robonix_manifest.yaml 是一个 robonix 部署的入口文件——rbnx boot -f robonix_manifest.yaml 读它来决定起哪些 system 服务、哪些 primitive / service / skill,以及给每个能力提供者喂什么配置。
结构:
manifestVersion: 1
name: my-robot # 部署名(任意)
env: # 可选:部署级 env(一般留空,env 在外层 export)
# ─── system: robonix 自带的系统组件 ───
# key 是固定的 system 服务名(atlas/executor/pilot/liaison/memory/scene/speech),
# value 是它的配置块;保持原样的层级会被 JSON 化喂给能力提供者的 on_init(cfg)。
system:
atlas:
listen: 127.0.0.1:50051
log: info
executor:
listen: 127.0.0.1:50061
log: info
pilot:
listen: 127.0.0.1:50071
log: info
vlm:
upstream: ${VLM_BASE_URL} # ${...} 会在加载时展开成环境变量
api_key: ${VLM_API_KEY}
model: ${VLM_MODEL}
liaison:
listen: 127.0.0.1:50081
log: info
memory:
backend: sqlite
scene:
log: info
# ─── primitive: 设备包列表(每条 = 一个物理设备的 primitive) ───
primitive:
- name: tiago_chassis # 必须等于该包 Python 源里 Primitive/Service/Skill(id="...") 的 id
path: ./primitives/tiago_chassis # 相对部署根的本地路径
config:
can_port: /dev/can0 # 整段 config 会以 JSON 传给 on_init(cfg)
odom_frame: odom
# ─── service: 算法 / 应用层服务 ───
service:
- name: simple_nav # 本地包
path: ./services/simple_nav
config:
max_linear: 0.5
- name: mapping # 远程 git 包:rbnx build 阶段克隆到 rbnx-boot/cache/
url: https://github.com/enkerewpo/mapping_rbnx
branch: main
config:
algo: rtabmap
# ─── skill: LLM/状态机触发的复合任务 ───
skill:
- name: explore
url: https://github.com/enkerewpo/explore_rbnx
branch: main
config:
timeout_s: 600
字段速查见 §16。
13. 启动
rbnx boot -f robonix_manifest.yaml 顺序:
- 加载 manifest,展开
${...}环境变量 - 起
system:下声明的所有 system 服务 - 按
primitive→service→skill顺序起每个用户包:spawn 后 poll atlas 拿到新注册的能力提供者,跟 manifest 该条目name:对账(不一致直接 fail),然后Driver(CMD_INIT, config_json)→on_init(cfg)→ 对 primitive/service 紧跟CMD_ACTIVATE推到ACTIVE(skill 停INACTIVE等 executor) - 全部就绪后阻塞,
Ctrl-C反向 teardown
约定:
- 同一层级内顺序起:service/skill 不解析依赖;要让 mapping 在 simple_nav 之前起就写前面。
- config 直传:yaml 里
config: { max_linear: 0.5 }→on_init(cfg)拿到cfg["max_linear"] == 0.5,嵌套结构原样保留。 name:必须等于 Python 源里Primitive/Service/Skill(id=...)的 id——boot 时 atlas 对账,不一致就退出。
单包调试:跳过 manifest 直接起一个:
rbnx start -p ./services/simple_nav -c local_config.yaml
rbnx start -p ./services/simple_nav -s max_linear=0.3 -s pid_linear=[1,0,0.1]
-c 跟一个 yaml 文件,整段当 config;-s key=value 单字段覆盖。最终都是以 JSON 喂给 on_init(cfg)。
Part V — 参考
14. Python API
robonix_api 是写原语 / 服务 / 技能的核心库——三个类 + 一组装饰器 + Result 类型 + ATLAS 客户端。每个 API 给出签名、参数、返回、机制、示例。
本节是 v0.1 发版前的 API 规划。dev 上已经按这套形态推进,签名 / 命名 / 默认值在正式发版前仍可能微调。
14.0 总表
from robonix_api import Service, Ok, Err, ATLAS # 或 Primitive / Skill
from robonix_api.atlas_types import Transport, Capability
签名里的
*是 keyword-only 标志——*之后的参数必须用name=value传,不能按位置传。
| API | 用途 |
|---|---|
Primitive(id, namespace) / Service(...) / Skill(...) | 构造一个能力提供者(按 package 类型选——三类的 lifecycle / 调度策略 / 可暴露的 contract 都有差异,详见 §3 / §5) |
service.run() | 阻塞主循环;注册 + listen + 心跳 + 等 SIGTERM |
@service.on_init(cfg) -> Result | REGISTERED → INACTIVE,必填 |
@service.on_activate() -> Result | INACTIVE → ACTIVE;skill 必填,primitive / service 可省(省时框架自动 Ok()) |
@service.on_deactivate() -> Result | ACTIVE → INACTIVE;规则同 on_activate |
@service.on_shutdown() -> Result | 任意 → TERMINATED,可选 |
Ok() / Err("reason") | lifecycle handler 返回值 |
ATLAS.query(*, kind=…, id=…, contract_id=…, namespace_prefix=…, transport=…) | 搜能力提供者记录 |
ATLAS.query_primitives/_services/_skills(...) | query() 已固定 kind 的快捷形式 |
ATLAS.find_capability(*, contract_id=…, transport=…, provider_kind=…, provider_id=…, namespace_prefix=…) | 按 contract 搜,返回 list[Capability] |
ATLAS.find_unique_capability(*, contract_id=…, ...) | 同上但断言只有一条;0 或 >1 都 raise |
service.connect_capability(cap_view, contract_id, transport) | 用一条 Capability 建 consumer → 提供方 Channel |
@service.mcp(contract_id, *, description="") | 把函数挂成 MCP 工具(mode=rpc,给 LLM 调);description 默认取 docstring |
@service.grpc(contract_id, *, description="") | 把函数挂成 contract 对应 gRPC 方法;建议显式传 description |
service.declare_ros2_topic / declare_ros2_service | 登记 ROS 2 端点 |
只读属性:service.id / service.namespace / service.state。
14.1 Primitive / Service / Skill
三个类构造签名一致:Primitive(id, namespace) / Service(id, namespace) / Skill(id, namespace)。按 package 类型挑一个——三类的 lifecycle / 调度策略 / 可暴露的 contract 都不同(详见 §3 / §5)。通常在模块顶部构造一个全局能力提供者,再用装饰器挂 handler。
| 参数 | 类型 | 必填 | 说明 |
|---|---|---|---|
id | str | 是 | 能力提供者 id(atlas 里唯一),必须等于 robonix_manifest.yaml 里挂这个包的 name:(两处一致) |
namespace | str | 是 | 该能力提供者所有 contract 的公共前缀,如 robonix/service/myorg。框架要求 contract_id 以 <namespace>/ 开头 |
机制:构造时只做轻量校验(namespace 非空、包根目录定位、<pkg>/rbnx-build/codegen/ 加进 sys.path)。不连接 atlas、不开端口——这些发生在 service.run()。
service = Service(id="my_navigate", namespace="robonix/service/myorg")
14.2 service.run()
阻塞主循环。main.py 最后一行通常就是 service.run(),内部按序:
- 连 atlas + 按 kind 调对应 Register RPC(失败则记 warning 并继续,能力提供者停在 REGISTERED)
- 启 gRPC server(自动选端口),挂
<namespace>/driver生命周期接口 + 所有@service.grpc业务方法 - 每条 gRPC contract 调
DeclareCapability - 有
@service.mcp则起 MCP HTTP server(FastMCP + uvicorn)并 declare - 起心跳线程(约 30s 一次;超 90s 无心跳 atlas 标 TERMINATED)
- 装 SIGTERM/SIGINT handler,触发时
on_shutdown→ 停 server → unregister signal.pause()阻塞
跑完 1-5 后 atlas 里只是 REGISTERED,等 Driver(CMD_INIT) 到达才进 INACTIVE——状态推进由 rbnx boot / executor 异步驱动。
14.3 lifecycle 装饰器
四个装饰器,对应 §5 的状态迁移。所有 handler 必须返回 Result(§14.7)。装饰器只在模块 import 时跑,把 fn 注册到能力提供者的 handler 表里,不包 wrapper、不改 fn 行为——保留可单测性。
| 装饰器 | 签名 | 必填 | 该做什么 |
|---|---|---|---|
@service.on_init | fn(cfg: dict) -> Result | 是 | 解析 cfg、用 ATLAS.query/find_capability 探上游。不申请热资源 |
@service.on_activate | fn() -> Result | skill 是 / primitive·service 否 | 申请热资源——开线程、加载模型、订阅 ROS、打开硬件 fd。必须可重入(skill evict 后会再 activate)。primitive/service 省略时框架自动 Ok() |
@service.on_deactivate | fn() -> Result | 同 on_activate | 对称释放 on_activate 的热资源;config 和 atlas 注册保留 |
@service.on_shutdown | fn() -> Result | 否 | flush 日志、关端口。返回值忽略(能力提供者无论如何都退出) |
cfg 来源:rbnx boot 时取 robonix_manifest.yaml 里该能力提供者的 config: 段;rbnx start -p <pkg> -c local.yaml 时取 -c 文件;都没传则 {}。
@service.on_init
def init(cfg: dict):
if cfg.get("require_camera") and not ATLAS.find_capability(
contract_id="robonix/primitive/camera/rgb"
):
return Err("camera not online")
return Ok()
@service.on_activate
def activate():
global controller
controller = Controller(...)
controller.start()
return Ok()
@service.on_deactivate
def deactivate():
global controller
if controller is not None:
controller.stop()
controller = None
return Ok()
14.4 ATLAS 发现 + connect
ATLAS 两种 API:
ATLAS.query(*, id=…, kind=…, contract_id=…, …)—— 能力提供者视角,按 id / kind / contract 搜能力提供者记录。ATLAS.query_primitives/_services/_skills是固定 kind 的快捷形式。ATLAS.find_capability(*, contract_id=…, transport=…, …)—— 接口视角,返回list[Capability](自带provider_id/provider_kind)。find_unique_capability在 0 或 >1 时 raise,依赖唯一 capability 时用。
service.connect_capability(cap_view, contract_id, transport) 用一条 Capability 开 Channel,ch.endpoint 是对方实际地址。
典型写法:
# 默认:全场唯一一个 provider 提供该 contract
cap_view = ATLAS.find_unique_capability(
contract_id="robonix/primitive/chassis/move",
transport=Transport.GRPC,
)
with service.connect_capability(cap_view, "robonix/primitive/chassis/move",
Transport.GRPC) as ch:
...
# 多 provider 时:按 provider_id 自己挑
capabilities = ATLAS.find_capability(contract_id="robonix/primitive/camera/rgb")
front = next((c for c in capabilities if c.provider_id == "tiago_camera_front"), None)
14.5 atlas-types 数据结构
ATLAS 是 module-level singleton(参照 prometheus_client.REGISTRY 风格),第一次访问时连到 atlas(端口取 ROBONIX_ATLAS,默认 127.0.0.1:50051)。
返回的两个 dataclass 都是 frozen,要新数据就重新 query。
能力提供者记录(ATLAS.query / query_primitives / query_services / query_skills 返回单元):
| 字段 | 类型 | 说明 |
|---|---|---|
id | str | 能力提供者 id(atlas 里唯一) |
kind | Kind | PRIMITIVE / SERVICE / SKILL |
namespace | str | contract 公共前缀 |
state | LifecycleState | §5.1 |
state_detail | str | ERROR 时为 reason,其它可能为空 |
last_heartbeat_ms | int | 上次心跳 unix ms |
capability_md_path | str | 注册时报上来的 CAPABILITY.md 路径 |
capabilities | tuple[Capability, ...] | 该能力提供者已声明的所有 Capability |
Capability(ATLAS.find_capability 返回单元):
| 字段 | 类型 | 说明 |
|---|---|---|
provider_id | str | 暴露这条 capability 的能力提供者 id |
provider_kind | Kind | 该能力提供者的 kind |
contract_id | str | 接口 id |
transport | Transport | gRPC / ROS2 / MCP |
params | GrpcParams | Ros2Params | McpParams | transport-specific(gRPC service+method / ROS 2 qos_profile / MCP description+schema) |
description | str | 来源合并:contract toml + declare 时传入 + 包根 CAPABILITY.md(给 Pilot 看的) |
Transport 是 IntEnum:UNSPECIFIED / GRPC / ROS2 / MCP;Kind 是 IntEnum:UNSPECIFIED / PRIMITIVE / SERVICE / SKILL。
ATLAS.query(*, kind, id, contract_id, namespace_prefix, transport)
[chassis] = ATLAS.query(id="tiago_chassis") # 按 id(0 或 1)
skills = ATLAS.query(kind=Kind.SKILL) # == query_skills()
providers = ATLAS.query(contract_id="robonix/primitive/chassis/move",
transport=Transport.GRPC) # 按 contract
ATLAS.find_capability(*, contract_id, transport, provider_kind, provider_id, namespace_prefix) -> list[Capability]
把所有能力提供者的 capabilities[] 拉平展开,返回所有匹配的 Capability(可能为空)。
on_init 里轻量探活最常用:
@service.on_init
def init(cfg):
if not ATLAS.find_capability(contract_id="robonix/service/map/occupancy_grid"):
return Err("mapping service not online")
return Ok()
ATLAS.find_unique_capability(*, contract_id, ...) -> Capability
同 find_capability,但 0 或 >1 都 raise ValueError,依赖唯一 capability 时用。
14.6 service.connect_capability
签名:service.connect_capability(cap_view, contract_id, transport) -> Channel
打开一条 consumer → 提供方通道,拿到该接口对方的 endpoint。
| 参数 | 类型 | 说明 |
|---|---|---|
cap_view | Capability | 上一步从 ATLAS.find_capability / find_unique_capability 拿到的那条 |
contract_id | str | 要消费的接口 |
transport | Transport | 走 gRPC / ROS2 / MCP |
返回:Channel,关键字段 + 方法:
| 名 | 类型 | 说明 |
|---|---|---|
endpoint | str | 对方实际地址(gRPC host:port / ROS topic 名 / MCP HTTP URL) |
params | transport-specific | gRPC 的 service+method / ROS 2 的 qos_profile / MCP 的 description+schema |
channel_id | str | atlas 给的句柄,框架内部追踪用 |
close() | method | 显式 disconnect(idempotent;多次调用安全) |
__enter__ / __exit__ | context manager | with 块退出时自动 close() |
机制:atlas 端记一条 consumer→提供方边(rbnx channels 审计 + 心跳追踪),框架维护能力提供者本地 channel 表——ch.close() / Channel.__exit__ / 能力提供者 teardown 都会调 atlas 的 DisconnectCapability 删掉对应边。
两种用法:
- 短寿命——
with service.connect_capability(...) as ch:块内用ch.endpoint,退出自动 disconnect。 - 长寿命——
on_activate里chassis_ch = service.connect_capability(...)存到模块级,on_deactivate调chassis_ch.close()释放(§7 速览例已示)。
框架兜底:忘 close() / with,teardown 时遍历内部 channel 表 Disconnect 所有未关。但显式 close 才规范——否则 atlas 端 consumer 边一直挂着,影响 rbnx channels 审计。
14.7 Result 类型
lifecycle handler 必须返回三种之一:
| 构造 | 含义 | 后续行为 |
|---|---|---|
Ok() | 成功 | 推进到下一态(CMD_INIT→INACTIVE 等) |
Err("reason") | 失败 | 进 ERROR,reason 写入 atlas 的 state_detail,rbnx caps -v 能看到 |
Deferred("reason") | 尚未就绪、稍后重试 | 不迁移状态,保持当前态,reason 写入 state_detail |
不返回 Result(例如忘了 return)会被框架视作 Err;handler 内部 raise 也会被捕获转成 Err(含异常类型与信息)。
return Ok()
return Err("device /dev/ttyUSB0 not found")
return Deferred("waiting for upstream map service")
14.8 service.declare_ros2_topic / service.declare_ros2_service
robonix v1 不 wrap rclpy——publisher / subscriber / service / client 直接 rclpy.init() + Node + create_publisher / create_subscription / create_service + spin。robonix 只插一个 declare 点告诉 atlas“我在某个 ROS 端点上提供某 contract“,让 consumer 能通过 ATLAS.find_capability + service.connect_capability(transport=ROS2) 拿到名字 + QoS。
ROS 2 有两类端点,分别对应两个 declare 方法:
| 方法 | 用途 | 对应 contract mode |
|---|---|---|
service.declare_ros2_topic | publish / subscribe 一条 topic | topic_in / topic_out |
service.declare_ros2_service | 提供一个 ROS 2 service(请求 / 响应一对一) | rpc |
ROS 2 action(长任务 + feedback + result)暂不支持。需要的话现在走
rpc_server_stream+ gRPC(feedback 用 server-stream 推),等后续版本补。
完整签名见下文。
declare_ros2_topic
service.declare_ros2_topic(
"robonix/primitive/lidar/lidar3d",
"/scanner_normalized",
qos="best_effort",
description="发布归一化点云(mid360 → robonix lidar3d 能力约定)",
)
| 参数 | 类型 | 说明 |
|---|---|---|
contract_id | str | 这个 publisher 满足的 contract |
topic | str | ROS topic 名 |
qos | str | QoS preset 字符串(见下表,默认 best_effort) |
description | str? | 这条 capability 的自然语言描述。ROS 2 没有 docstring-as-description 的惯例,建议显式传——三源合并规则同 @service.mcp(contract toml + 这里 + CAPABILITY.md) |
QoS preset(字符串)跟 ROS 2 官方 rmw builtin profile 一致:
| 字符串 | reliability / durability / depth | 何时用 |
|---|---|---|
"best_effort" | BEST_EFFORT / VOLATILE / depth=10 | 默认;可丢但要新鲜的流 |
"reliable" | RELIABLE / VOLATILE / depth=10 | 不允许丢的小流(控制命令、状态变更) |
"sensor_data" | BEST_EFFORT / VOLATILE / depth=5 | 高频传感器流(lidar 扫描、相机帧) |
"latched" / "transient_local" | RELIABLE / TRANSIENT_LOCAL / depth=1 | 静态信息(地图、相机外参)——晚来的订阅者也能拿到最近一次值 |
declare_ros2_service
service.declare_ros2_service(
"robonix/service/navigation/navigate",
"/navigate_to_pose",
description="把底盘开到 goal 指定位姿",
)
| 参数 | 类型 | 说明 |
|---|---|---|
contract_id | str | 该 service 满足的 contract(contract toml 必须 mode=rpc) |
service | str | ROS 2 service 名 |
description | str? | 同 declare_ros2_topic |
ROS 2 service 的 QoS 用框架默认(reliable / depth=10),不暴露给开发者。
提供方:rclpy publisher + 一行 declare
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan
@service.on_activate
def activate():
global node, pub
rclpy.init()
node = Node("my_lidar_cap")
pub = node.create_publisher(LaserScan, "/scanner_normalized", 10)
service.declare_ros2_topic(
"robonix/primitive/lidar/lidar3d",
"/scanner_normalized",
qos="best_effort",
)
threading.Thread(target=lambda: rclpy.spin(node), daemon=True).start()
return Ok()
# 业务代码里:
pub.publish(scan_msg)
消费方:ATLAS.find_capability + service.connect_capability(transport=ROS2) + rclpy subscription
service.connect_capability(...) 拿到的 Channel.endpoint 就是 topic 名(或 service 名),Channel.params.qos_profile 是 declare 时给的 QoS preset(service 时为空)。
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan
@service.on_activate
def activate():
cap_view = ATLAS.find_unique_capability(
contract_id="robonix/primitive/lidar/lidar3d",
transport=Transport.ROS2,
)
ch = service.connect_capability(cap_view,
"robonix/primitive/lidar/lidar3d",
Transport.ROS2)
rclpy.init()
node = Node("my_consumer")
node.create_subscription(LaserScan, ch.endpoint, on_scan,
qos_profile=qos_from_str(ch.params.qos_profile))
threading.Thread(target=lambda: rclpy.spin(node), daemon=True).start()
return Ok()
qos_from_str(...) 是项目里几行的 helper(把字符串映射到 rclpy.qos.QoSProfile),常见做法是:
from rclpy.qos import qos_profile_sensor_data, qos_profile_system_default
def qos_from_str(s):
return {
"best_effort": qos_profile_system_default,
"reliable": qos_profile_system_default,
"sensor_data": qos_profile_sensor_data,
}.get(s, qos_profile_system_default)
为什么不 wrap rclpy:ROS 2 是它自己一整套生命周期管理(Context/Executor/Node),robonix wrap 一层只会让用户在两套模型间切换。declare_ros2_topic / declare_ros2_service 是 robonix 在 ROS 2 路径上唯一的介入——告诉 atlas 端点名 + QoS,仅此而已。
14.9 @service.mcp / @service.grpc
@service.mcp(contract_id, *, description="") — MCP 工具
把一个普通 Python 函数挂成一条 MCP 工具,pilot / 任何 MCP 客户端都能调到。
要求:
- 函数有类型注解——参数类型(
req)+ 返回类型——必须是 codegen 生成的 dataclass(<pkg>/rbnx-build/codegen/robonix_mcp_types/...)。FastMCP 用类型注解生成 JSON Schema 给 LLM。 - contract toml 的
mode必须是rpc(其它 mode 会 raise)。
# myorg_mcp 是 robonix_mcp_types/myorg_mcp.py,能力提供者构造时它的目录已加入 sys.path
from myorg_mcp import Hello_Request, Hello_Response
@service.mcp("robonix/service/myorg/hello")
def hello(req: Hello_Request) -> Hello_Response:
"""打招呼。LLM 任何时候想跟人说话都可以调。"""
return Hello_Response(message=f"hi {req.name}")
description(给 Pilot LLM 看的自然语言)的三源合并:
- contract toml 的
[contract].description(能力约定级默认;同一 contract 所有实现共用) - 装饰器的
description=kwarg;没传就 fallback 到fn.__doc__(MCP 生态惯例:docstring 即 tool description) - 包根的
CAPABILITY.md(能力提供者级长文档,整个包共享)
三个都拼给 LLM。最常用就是 docstring——FastMCP 也认;显式覆盖时写 @service.mcp("...", description="...")。
codegen 生成的 dataclass 命名是 <SrvName>_Request / <SrvName>_Response(按 ROS srv 文件名);msg 文件直接是 <MsgName>。每个能力提供者一个 FastMCP HTTP server(自动选端口),所有 @service.mcp 都挂在同一 server 上。MCP server 端的工具名固定 = contract_id 末段(跟 executor dispatch 那一侧用同一个推导),所以装饰器不暴露 name= kwarg——避免函数名 / 工具名漂移撞 executor。
@service.grpc(contract_id, *, description="") — gRPC 方法 handler
把一个 Python 函数挂成 contract 对应 gRPC servicer 的方法实现。
机制:codegen 给每条带 gRPC transport 的 contract 生成 <PascalContractId>Servicer 抽象类(在 <pkg>/rbnx-build/codegen/proto_gen/robonix_contracts_pb2_grpc.py)。装饰器把你的函数包成这个 servicer 的子类,挂到能力提供者共享的 gRPC server 上。handler 函数的形态由 contract 的 [mode] type 决定——下面这张表列了所有 6 种 mode 对应的 handler 写法。
description:gRPC 生态本身没有“docstring 当工具说明“的惯例,建议在装饰器里显式传 description="..."(不传时框架仍会 fallback 到 fn.__doc__,但 gRPC 调用方一般不读 docstring,最好别赖这个)。三源合并规则同 @service.mcp(contract toml + 装饰器 description= / docstring + CAPABILITY.md,三者拼给 Pilot)。
import chassis_pb2 # codegen 出来的 protobuf 类
@service.grpc("robonix/primitive/chassis/move", description="发底盘速度命令,单位 m/s 与 rad/s")
def execute_move_command(req: chassis_pb2.ExecuteMoveCommand_Request, ctx):
chassis.send_velocity(req.linear_x, req.angular_z)
return chassis_pb2.ExecuteMoveCommand_Response(ok=True)
handler 参数类型——robonix 不重新发明,直接套用 grpc-python 上游惯例:
| 名 | 实际运行时类型 | 用法 |
|---|---|---|
request | codegen 生成的 protobuf 消息类的对象,例如 chassis_pb2.ExecuteMoveCommand_Request——它继承自 google.protobuf.message.Message | 单次请求 mode(rpc / rpc_server_stream / topic_out)。直接 req.field_name 读字段 |
request_iterator | grpc._server._RequestIterator(grpc-python 内部类)——只用到 sync iterator 协议(__iter__ + __next__)。每次 next(request_iterator) 阻塞到下一条消息到达,返回值是 codegen 出的 protobuf 消息类的对象(“流元素类型”,由 IDL 决定,详见 §8.5 streaming mode 约束);客户端关流时 raise StopIteration | 请求流 mode(rpc_client_stream / rpc_bidirectional_stream / topic_in)。规范用法:for chunk in request_iterator: ...,每个 chunk 跟 unary mode 的 request 同 Python 类型,只是逐个到达;循环在客户端关流时自动退出 |
ctx | grpc._server._Context,公开接口 grpc.ServicerContext | 常用:ctx.is_active() 判客户端是否还连着、ctx.cancel() 主动断、ctx.set_trailing_metadata(...) 加 trailer、ctx.peer() 拿调用方地址 |
关于 yield:server-stream / bidi-stream / topic_out 三种 mode 的 handler 用 yield 而不是 return——yield 是 Python 关键字,把函数变成生成器函数(generator function)。区别:
- 普通函数
return x:调用立刻执行到底,返回x。 - 生成器函数
yield x:调用不立刻执行,返回一个生成器对象。每次外部next()才执行到下一个yield把x送出,函数挂起;return或自然结束即迭代终止。
gRPC 框架自动遍历 handler 返回的 generator,把每个 yield 出的对象塞进响应流。这跟 grpc-python 上游一致,详见官方 Basics tutorial service-side 章节。
6 种 mode 的 handler 形态:
import chassis_pb2 # codegen 生成的消息类
import audio_pb2 # 用 audio 流式接口举例
import std_msgs_pb2 # ack 用 Empty
(1) rpc — 一发一收
@service.grpc("robonix/primitive/chassis/move")
def execute_move_command(req, ctx):
chassis.send_velocity(req.linear_x, req.angular_z)
return chassis_pb2.ExecuteMoveCommand_Response(ok=True)
handler (req) 或 (req, ctx);return 一个 Response。框架按 inspect 自适应。
(2) rpc_server_stream — 一收多发
@service.grpc("robonix/system/executor/execute")
def execute(req, ctx):
"""收到 Plan,按 step 流式回 CapabilityCallEvent。"""
for step in req.plan.steps:
yield executor_pb2.CapabilityCallEvent(call_id=step.call_id, result=run_step(step))
if not ctx.is_active():
break
每 yield 一个 Response;return 或函数结束即关流;ctx.is_active() 检查订阅是否还在。
(3) rpc_client_stream — 多收一发
@service.grpc("robonix/primitive/audio/speaker")
def stream(request_iterator, ctx):
for chunk in request_iterator: # 阻塞迭代到客户端 done
speaker.write(chunk.data)
return std_msgs_pb2.Empty()
第一个参数是迭代器(习惯叫 request_iterator),for chunk in ... 阻塞到客户端关流,最后 return 一个 Response。
(4) rpc_bidirectional_stream — 多收多发
@service.grpc("robonix/system/speech/asr_stream")
def asr_stream(request_iterator, ctx):
decoder = StreamingDecoder()
for chunk in request_iterator:
decoder.feed(chunk.data)
if (partial := decoder.peek()):
yield asr_pb2.RecognizeStreamEvent(event_type=asr_pb2.PARTIAL, text=partial)
yield asr_pb2.RecognizeStreamEvent(event_type=asr_pb2.FINAL, text=decoder.finalize())
request_iterator 进、yield 出,两侧独立异步,不需要一对一。
(5) topic_out — 持续 publish
走 gRPC 时 = server streaming:consumer 发 Empty 订阅,能力 while ctx.is_active(): yield frame。形态同 (2),语义是主动持续推。
(6) topic_in — 持续 subscribe
走 gRPC 时 = client streaming:consumer 发流、能力消费。形态同 (3),语义是该能力是 sink。
topic_* 走 ROS 2 transport 时不用 @service.grpc——见 §14.8 service.declare_ros2_topic + 用户自管的 rclpy publisher/subscription。topic_* 只在该 contract 想跨语言或穿 docker 网络时才走 gRPC。
14.10 只读属性
| 属性 | 用途 |
|---|---|
service.id | 构造时给的能力提供者 id |
service.namespace | 构造时给的 namespace |
service.state | 当前 lifecycle 状态(LifecycleState 枚举) |
15. CLI
rbnx build / rbnx clean 在部署根目录(含 robonix_manifest.yaml)和单包目录(含 package_manifest.yaml)下行为不同——参考下面的“工作目录“列。
| 子命令 | 工作目录 | 作用 |
|---|---|---|
rbnx --version | 任意 | 版本 |
rbnx path <key> | 任意 | 查 robonix 子树(root / rust / capabilities / interfaces-lib / runtime-proto / robonix-api) |
rbnx codegen [--mcp] | 单包 | 给当前 package 生 proto stubs / MCP dataclass 到 <pkg>/rbnx-build/codegen/ |
rbnx build | 部署根 | 遍历 manifest 里所有 primitive/service/skill,依次跑各包的 package_manifest.build |
rbnx build | 单包 | 跑当前包的 package_manifest.build |
rbnx clean | 部署根 | 清整套部署的 rbnx-build/ + rbnx-boot/cache/ |
rbnx clean | 单包 | 只清当前包的 rbnx-build/ |
rbnx clean --cache | 部署根 | 同上 + 也清 rbnx-boot/cache/ 里克隆下来的远程包 |
rbnx start -p <pkg> [-c <yaml>] [-s k.v=val] | 任意 | 单包启动(开发用),跳过 manifest |
rbnx boot -f <manifest.yaml> | 部署根 | 起整套部署 |
rbnx shutdown -f <manifest.yaml> | 部署根 | 拆 boot(pkill + docker 清理) |
rbnx caps [-v] | 任意 | 看 atlas 当前能力提供者列表 |
rbnx contracts [-p <prefix>] | 任意 | 看 atlas 已知的 contract registry |
rbnx ask "<prompt>" | 任意 | 单次 LLM 提问(走 pilot) |
rbnx chat | 任意 | 交互式对话(走 liaison) |
16. 配置字段
16.1 package_manifest.yaml
| 字段 | 类型 | 必填 | 说明 |
|---|---|---|---|
manifestVersion | int | 是 | 当前 1 |
package.name | string | 是 | 反向域名 |
package.version | string | 是 | semver |
package.vendor | string | 否 | |
package.license | string | 否 | SPDX |
build | string | 是 | shell 命令 |
start | string | 是 | shell 命令 |
capabilities[] | list | 是 | [{name: "robonix/.../X"}] |
16.2 robonix_manifest.yaml
顶层字段:
| 字段 | 类型 | 说明 |
|---|---|---|
manifestVersion | int | 1 |
name | string | 部署名(任意) |
env | object | 部署级环境变量(一般留空) |
system | map | system 服务的配置块;key 是固定 system 名(atlas/executor/pilot/liaison/memory/scene/speech…),value 透传给该 system 服务的 on_init |
primitive | list | primitive 包列表 |
service | list | service 包列表 |
skill | list | skill 包列表 |
primitive / service / skill 列表中每个条目:
| 字段 | 类型 | 说明 |
|---|---|---|
name | string | 必须等于该包 Python 源里 Primitive/Service/Skill(id="...") 的 id(rbnx boot 用这个对账,不一致会失败) |
path | string | 本地包目录(相对部署根) — 与 url 二选一 |
url | string | 远程 git 仓库;rbnx build 阶段克隆到 rbnx-boot/cache/ |
branch | string | 远程包分支;与 url 配套 |
config | object | 整段以 JSON 化形式喂给该包的 on_init(cfg) |
启动顺序:system 区块先按固定顺序起 → 然后 primitive → service → skill,每段内部按 manifest 写入顺序。当前 dev 不解析跨条目的 depends_on;要让 A 先于 B 起就把 A 写在前面。
16.3 contract toml
| 字段 | 说明 |
|---|---|
[contract] id | 接口 ID,全局唯一 |
[contract] version | 字符串,从 "1" 起 |
[contract] kind | primitive / service / skill |
[contract] idl | 引用 IDL 文件,相对 lib/ 根,例如 chassis/srv/Move.srv 或 nav_msgs/msg/Odometry.msg |
[contract] description | 能力约定级默认描述(自然语言)。declare 时若不另传 / 不写 docstring,consumer 端 fallback 到这条;详见 §14.9 三源合并 |
[mode] type | rpc / rpc_server_stream / rpc_client_stream / rpc_bidirectional_stream / topic_in / topic_out |